> 数据图表如何解释行星减速器分类
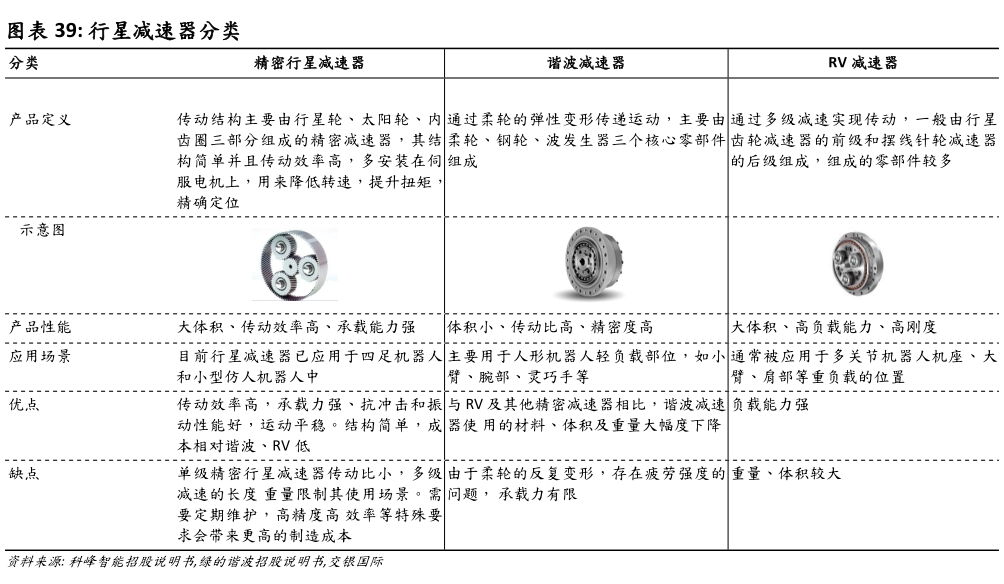
2025-4-3根据不同的构造和传动方式,减速器可分为行星减速器、谐波减速器和 RV 减速器。行星减速器结构简单且传动效率高,其常被用于机器人中对精度要求低的部分身体旋转关节。谐波减速器传动精度高,重量和体积小,运转平稳、传动比大,主要用于人形机器人轻负载部位,如小臂、腕部、灵巧手等。RV 减速器由第一级渐开线行星传动和第二级摆线行星传动组合而成,刚性和耐过载冲击性能好,传动精度高,通常被应用于多关节机器人机座、大臂、肩部等重负载的位置。从当前各家人形机器人本体结构上看,使用了较多行星和谐波减速器。以特斯拉人形机器人 Optimus Gen2 为例,其全身共使用了 14 个谐波减速器和 12 个行星减速器,14 个谐波减速器分别用于肩部、肘部、腰部等部位的旋转关节中,12 个行星减速器则用于灵巧手内部传动装置中。