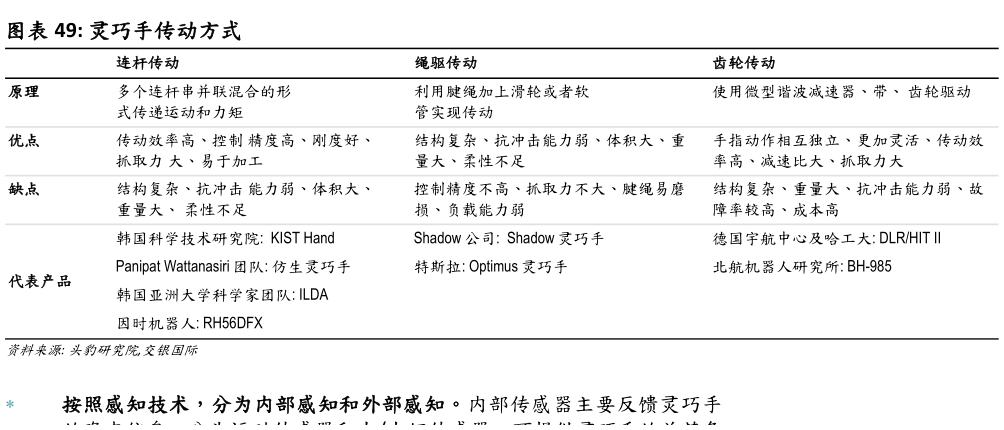
> 数据图表一起讨论下灵巧手传动方式2025-4-3根据传动方式分类,有腱传动、连杆传动、齿轮蜗轮蜗杆传动。连杆传动广泛用于工业、假肢领域,刚度大,易于强力抓取物体,但重量体积较大,柔性不足。绳驱传动主要用于科研领域和人形机器人领域,灵活度高、结构简单,但控制精度不足,寿命短,已有 Shadow 等灵巧手落地,也是特斯拉机器人配备的灵巧手类型齿轮传动主要应用于工业机器人,每根手指可独立操纵,灵活性强,但结构复杂、易发生故障,成本较高。交银国际证券工业制造