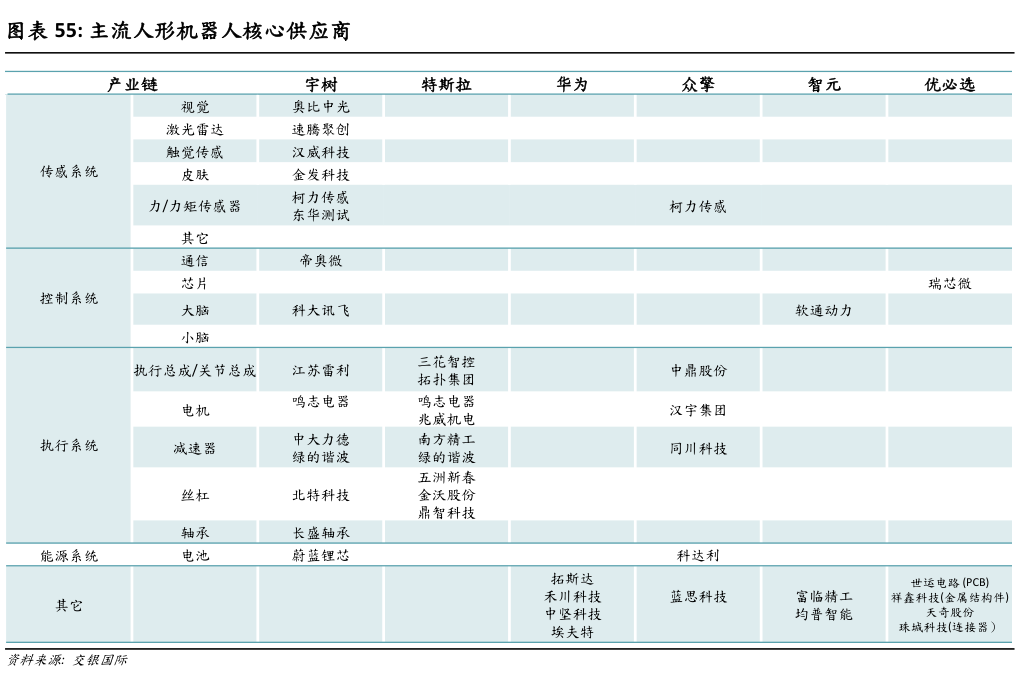
> 数据图表想关注一下主流人形机器人核心供应商2025-4-3基于该大模型,双臂机器人可做到用极少的样本,完成各种物理环境变量、动作模式的泛化和迁移,并利用低成本硬件即可实现对不规则物体的精细操作(如抓握、拾取、切割等),以及折叠衣服、冲泡饮料等复杂任务,展现出相当程度的泛化性能。交银国际证券工业制造