> 数据图表怎样理解
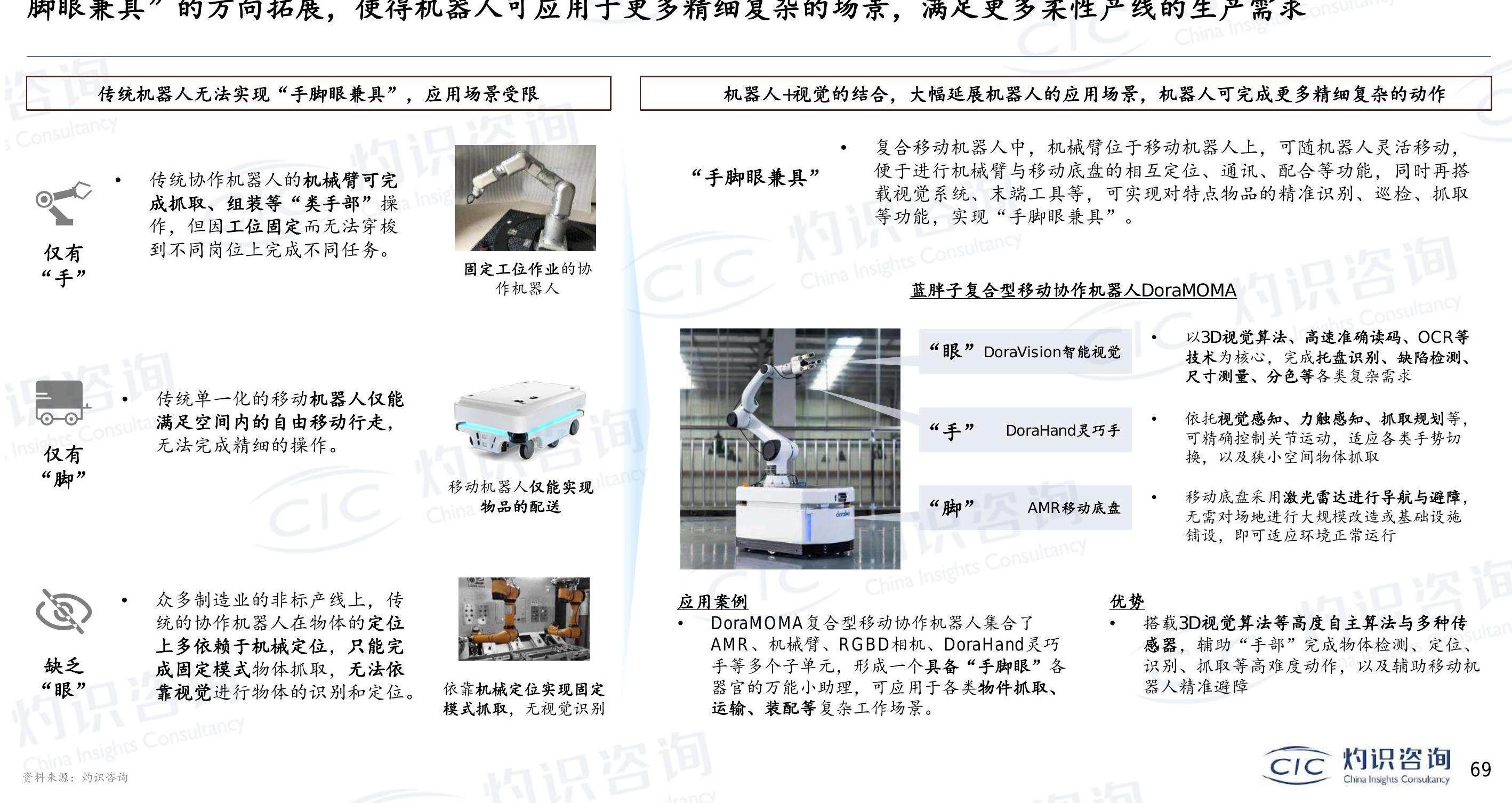
2022-12-4的万向诺展,满正绒的生传统机器人无法实现“手脚眼兼具”,应用场景受限机器人+视觉的结合,大幅延展机器人的应用场景,机器人可完成更多精细复杂的动作复合移动机器人中,机械臂位于移动机器人上,可随机器人灵活移动,便于进行机械臂与移动底盘的相互定位、通讯、配合等功能,同时再搭传统协作机器人的机械臂可完“手脚眼兼具”载视觉系统、末端工具等,可实现对特点物品的精准识别、巡检、抓取成抓取、组装等“类手部”操等功能,实现“手脚眼兼具”。作,但因工位固定而无法穿梭仅有到不同岗位上完成不同任务。固定工位作业的协“手”的识咨询作机器人蓝胖子复合型移动协作机器人DoraMOMA以3D视觉算法、高速准确读码、OCR等“眼”DoraVision智能视觉技术为核心,完成托盘识别、缺陷检测、尺寸测量、分色等各类复杂需求传统单一化的移动机器人仅能olo满足空间内的自由移动行走,依托视觉感知、力触感知、抓取规划等,“手”DoraHand灵巧手可精确控制关节运动,适应各类手势切无法完成精细的操作。仅有换,以及狭小空间物体抓取“脚”移动机器人仅能实现移动底盘采用激光雷达进行导航与避障,物品的配送“脚”AMR移动底盘无需对场地进行大规模改造或基础设施铺设,即可适应环境正常运行众多制造业的非标产线上,传应用案例优势统的协作机器人在物体的定位DoraMOMA复合型移动协作机器人集合了搭载3D视觉算法等高度自主算法与多种传上多依赖于机械定位,只能完AMR、机械臂、RGBD相机、DoraHand灵巧感器,辅助“手部”完成物体检测、定位、缺乏成固定模式物体抓取,无法依手等多个子单元,形成一个具备“手脚眼”各识别、抓取等高难度动作,以及辅助移动机“眼”器官的万能小助理,可应用于各类物件抓取、器人精准避障靠视觉进行物体的识别和定位。依靠机械定位实现固定模式抓取,无视觉识别运输、装配等复杂工作场景。灼识咨询资料来源:灼识咨询约识咨询CTC69Chinalnsights Consulcancy