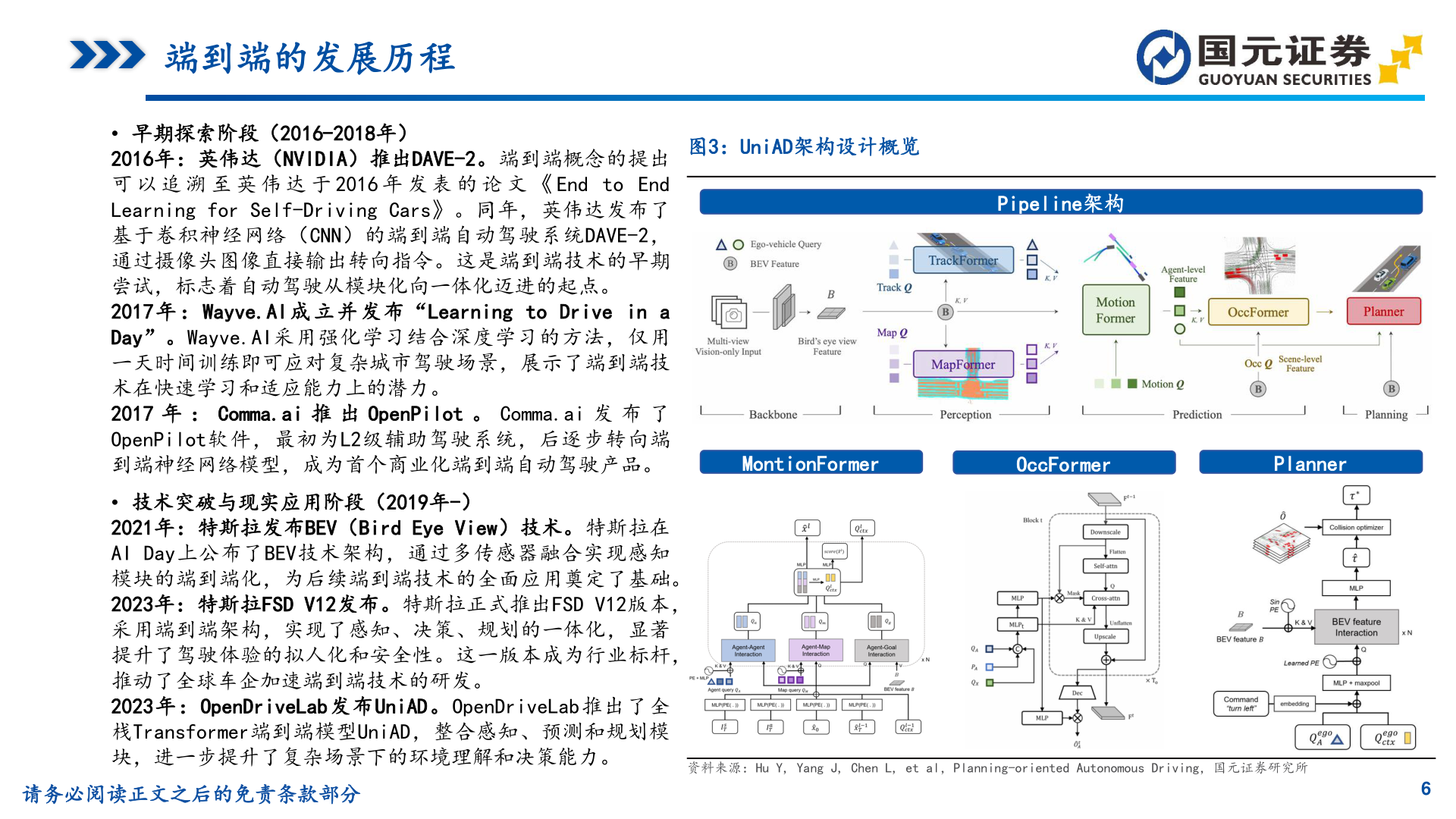
> 数据图表各位网友请教一下端到端的发展历程2025-3-1端到端的发展历程• 早期探索阶段(2016-2018年)2016年:英伟达(NVIDIA)推出DAVE-2。端到端概念的提出可 以 追 溯 至 英 伟 达 于 2016 年 发 表 的 论 文 《 End to EndLearning for Self-Driving Cars》。同年,英伟达发布了基于卷积神经网络(CNN)的端到端自动驾驶系统DAVE-2,通过摄像头图像直接输出转向指令。这是端到端技术的早期尝试,标志着自动驾驶从模块化向一体化迈进的起点。2017年 : Wayve.AI 成立 并发布 “Learning to Drive in aDay”。Wayve.AI采用强化学习结合深度学习的方法,仅用一天时间训练即可应对复杂城市驾驶场景,展示了端到端技术在快速学习和适应能力上的潜力。2017 年 : Comma.ai 推 出 OpenPilot 。 Comma.ai 发 布 了OpenPilot软件,最初为L2级辅助驾驶系统,后逐步转向端到端神经网络模型,成为首个商业化端到端自动驾驶产品。图3:UniAD架构设计概览Pipeline架构MontionFormerOccFormerPlanner• 技术突破与现实应用阶段(2019年-)2021年:特斯拉发布BEV(Bird Eye View)技术。特斯拉在AI Day上公布了BEV技术架构,通过多传感器融合实现感知模块的端到端化,为后续端到端技术的全面应用奠定了基础。2023年:特斯拉FSD V12发布。特斯拉正式推出FSD V12版本,采用端到端架构,实现了感知、决策、规划的一体化,显著提升了驾驶体验的拟人化和安全性。这一版本成为行业标杆,推动了全球车企加速端到端技术的研发。2023年:OpenDriveLab发布UniAD。OpenDriveLab推出了全栈Transformer端到端模型UniAD,整合感知、预测和规划模块,进一步提升了复杂场景下的环境理解和决策能力。资料来源:Hu Y, Yang J, Chen L, et al,Planning-oriented Autonomous Driving,国元证券研究所请务必阅读正文之后的免责条款部分6国元证券综合其他