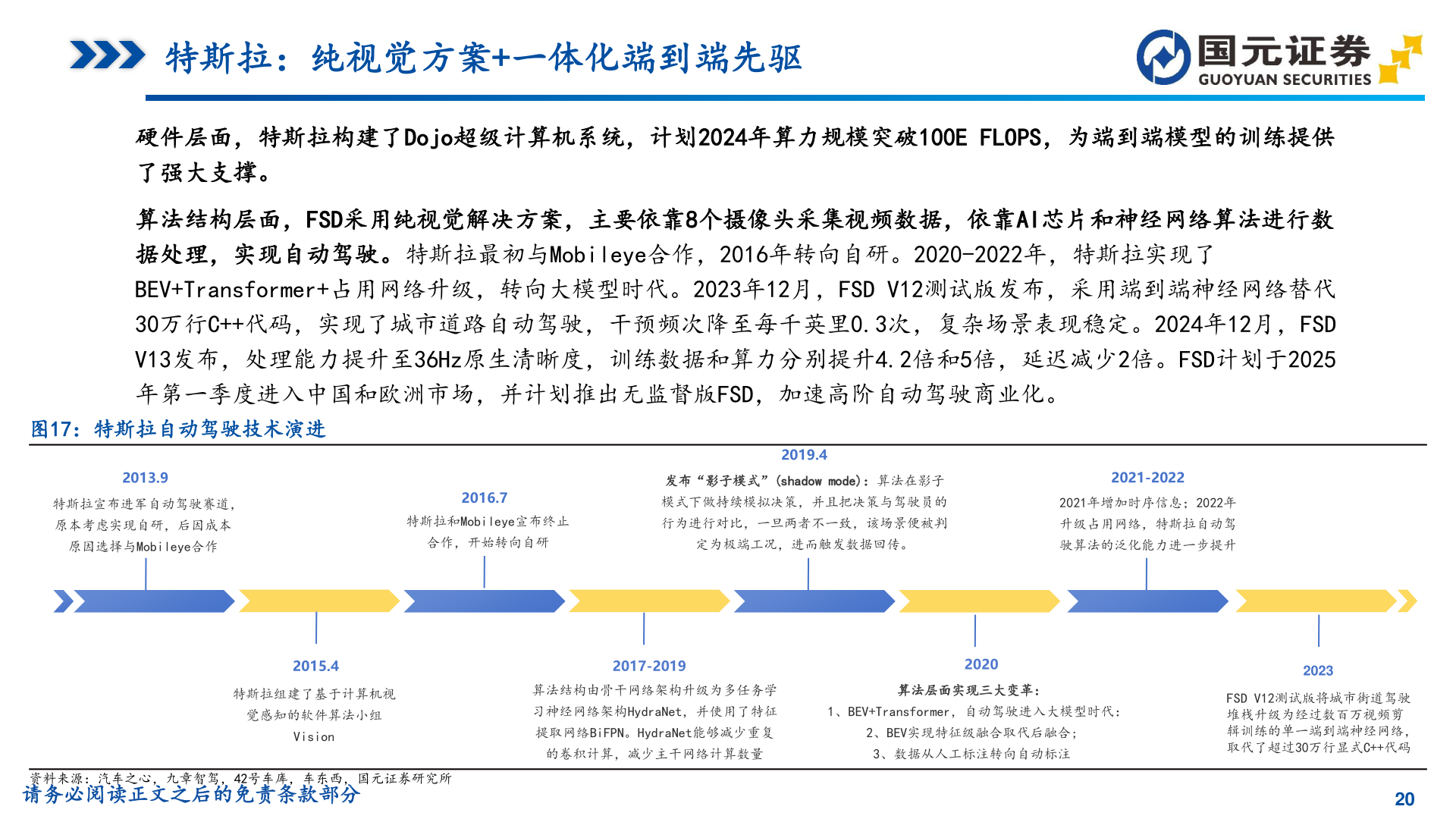
> 数据图表你知道特斯拉:纯视觉方案+一体化端到端先驱2025-3-1特斯拉:纯视觉方案+一体化端到端先驱硬件层面,特斯拉构建了Dojo超级计算机系统,计划2024年算力规模突破100E FLOPS,为端到端模型的训练提供了强大支撑。算法结构层面,FSD采用纯视觉解决方案,主要依靠8个摄像头采集视频数据,依靠AI芯片和神经网络算法进行数据处理,实现自动驾驶。特斯拉最初与Mobileye合作,2016年转向自研。2020-2022年,特斯拉实现了BEV+Transformer+占用网络升级,转向大模型时代。2023年12月,FSD V12测试版发布,采用端到端神经网络替代30万行C++代码,实现了城市道路自动驾驶,干预频次降至每千英里0.3次,复杂场景表现稳定。2024年12月,FSD V13发布,处理能力提升至36Hz原生清晰度,训练数据和算力分别提升4.2倍和5倍,延迟减少2倍。FSD计划于2025年第一季度进入中国和欧洲市场,并计划推出无监督版FSD,加速高阶自动驾驶商业化。图17:特斯拉自动驾驶技术演进2013.9特斯拉宣布进军自动驾驶赛道,原本考虑实现自研,后因成本原因选择与Mobileye合作2016.7特斯拉和Mobileye宣布终止合作,开始转向自研2019.4发布“影子模式”(shadow mode):算法在影子模式下做持续模拟决策,并且把决策与驾驶员的行为进行对比,一旦两者不一致,该场景便被判定为极端工况,进而触发数据回传。2021-20222021年增加时序信息;2022年升级占用网络,特斯拉自动驾驶算法的泛化能力进一步提升2015.4特斯拉组建了基于计算机视觉感知的软件算法小组Vision2017-20192020算法结构由骨干网络架构升级为多任务学算法层面实现三大变革:习神经网络架构HydraNet,并使用了特征1、BEV+Transformer,自动驾驶进入大模型时代:提取网络BiFPN。HydraNet能够减少重复2、BEV实现特征级融合取代后融合;的卷积计算,减少主干网络计算数量3、数据从人工标注转向自动标注资料来源:汽车之心,九章智驾,42号车库,车东西,国元证券研究所请务必阅读正文之后的免责条款部分2023FSD V12测试版将城市街道驾驶堆栈升级为经过数百万视频剪辑训练的单一端到端神经网络,取代了超过30万行显式C++代码20国元证券综合其他