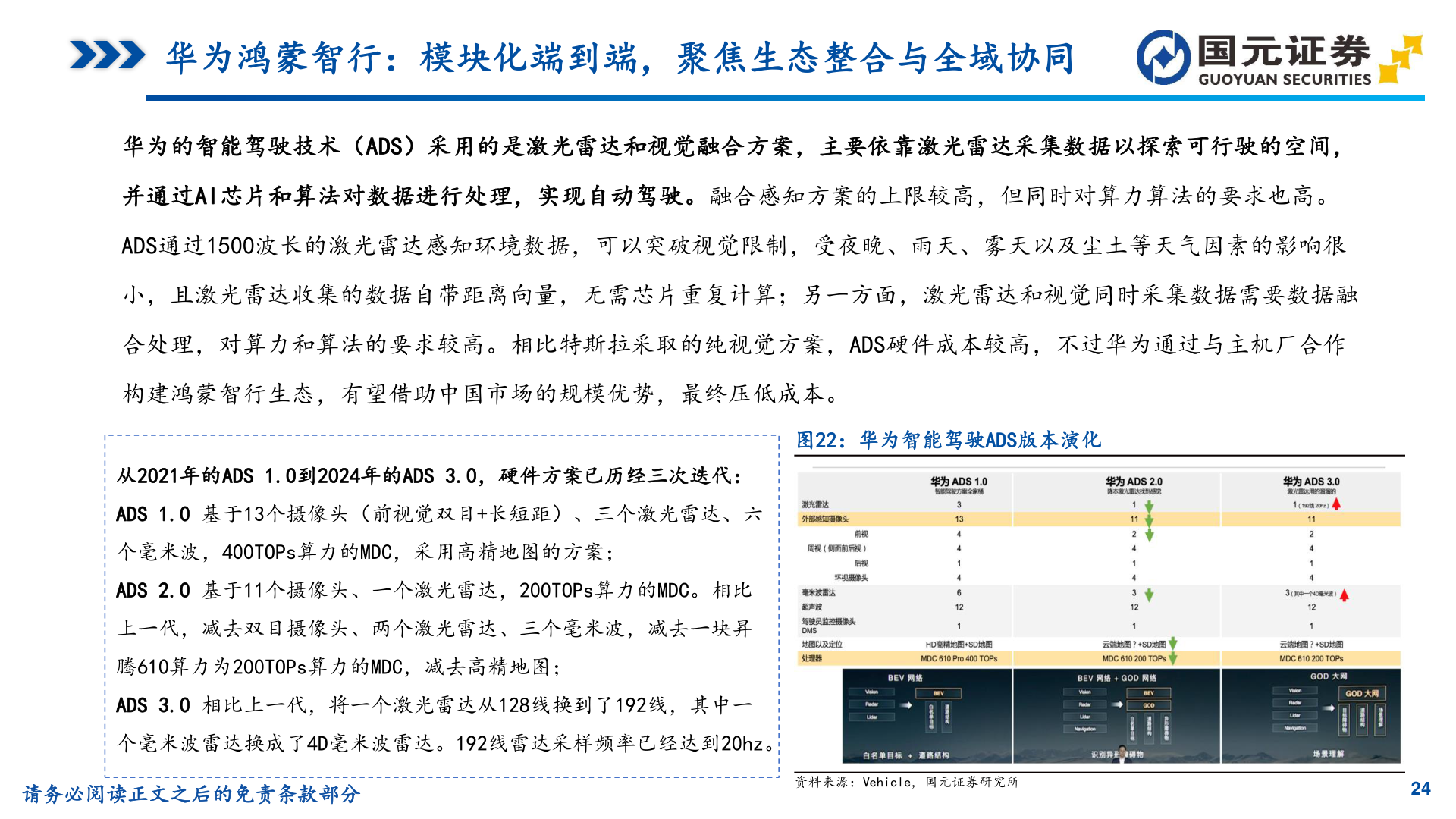
> 数据图表如何解释华为鸿蒙智行:模块化端到端,聚焦生态整合与全域协同2025-3-1华为鸿蒙智行:模块化端到端,聚焦生态整合与全域协同华为的智能驾驶技术(ADS)采用的是激光雷达和视觉融合方案,主要依靠激光雷达采集数据以探索可行驶的空间,并通过AI芯片和算法对数据进行处理,实现自动驾驶。融合感知方案的上限较高,但同时对算力算法的要求也高。ADS通过1500波长的激光雷达感知环境数据,可以突破视觉限制,受夜晚、雨天、雾天以及尘土等天气因素的影响很小,且激光雷达收集的数据自带距离向量,无需芯片重复计算;另一方面,激光雷达和视觉同时采集数据需要数据融合处理,对算力和算法的要求较高。相比特斯拉采取的纯视觉方案,ADS硬件成本较高,不过华为通过与主机厂合作构建鸿蒙智行生态,有望借助中国市场的规模优势,最终压低成本。图22:华为智能驾驶ADS版本演化从2021年的ADS 1.0到2024年的ADS 3.0,硬件方案已历经三次迭代:ADS 1.0 基于13个摄像头(前视觉双目+长短距)、三个激光雷达、六个毫米波,400TOPs算力的MDC,采用高精地图的方案;ADS 2.0 基于11个摄像头、一个激光雷达,200TOPs算力的MDC。相比上一代,减去双目摄像头、两个激光雷达、三个毫米波,减去一块昇腾610算力为200TOPs算力的MDC,减去高精地图;ADS 3.0 相比上一代,将一个激光雷达从128线换到了192线,其中一个毫米波雷达换成了4D毫米波雷达。192线雷达采样频率已经达到20hz。请务必阅读正文之后的免责条款部分资料来源:Vehicle,国元证券研究所24国元证券综合其他