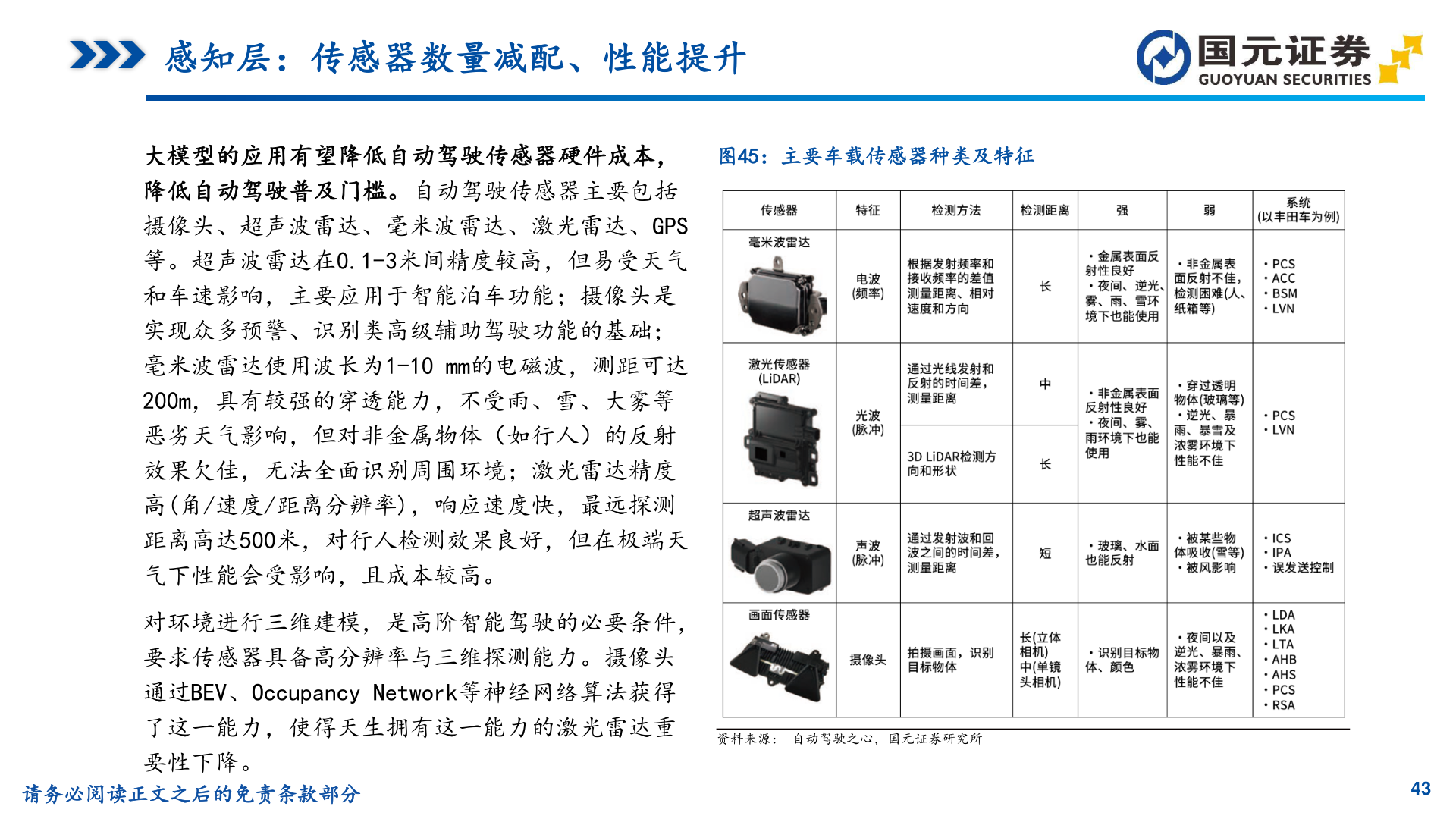
> 数据图表谁知道感知层:传感器数量减配、性能提升2025-3-1感知层:传感器数量减配、性能提升大模型的应用有望降低自动驾驶传感器硬件成本,降低自动驾驶普及门槛。自动驾驶传感器主要包括摄像头、超声波雷达、毫米波雷达、激光雷达、GPS等。超声波雷达在0.1-3米间精度较高,但易受天气和车速影响,主要应用于智能泊车功能;摄像头是实现众多预警、识别类高级辅助驾驶功能的基础;毫米波雷达使用波长为1-10 mm的电磁波,测距可达200m,具有较强的穿透能力,不受雨、雪、大雾等恶劣天气影响,但对非金属物体(如行人)的反射效果欠佳,无法全面识别周围环境;激光雷达精度高(角/速度/距离分辨率),响应速度快,最远探测距离高达500米,对行人检测效果良好,但在极端天气下性能会受影响,且成本较高。对环境进行三维建模,是高阶智能驾驶的必要条件,要求传感器具备高分辨率与三维探测能力。摄像头通过BEV、Occupancy Network等神经网络算法获得了这一能力,使得天生拥有这一能力的激光雷达重要性下降。图45:主要车载传感器种类及特征资料来源: 自动驾驶之心,国元证券研究所请务必阅读正文之后的免责条款部分43国元证券综合其他