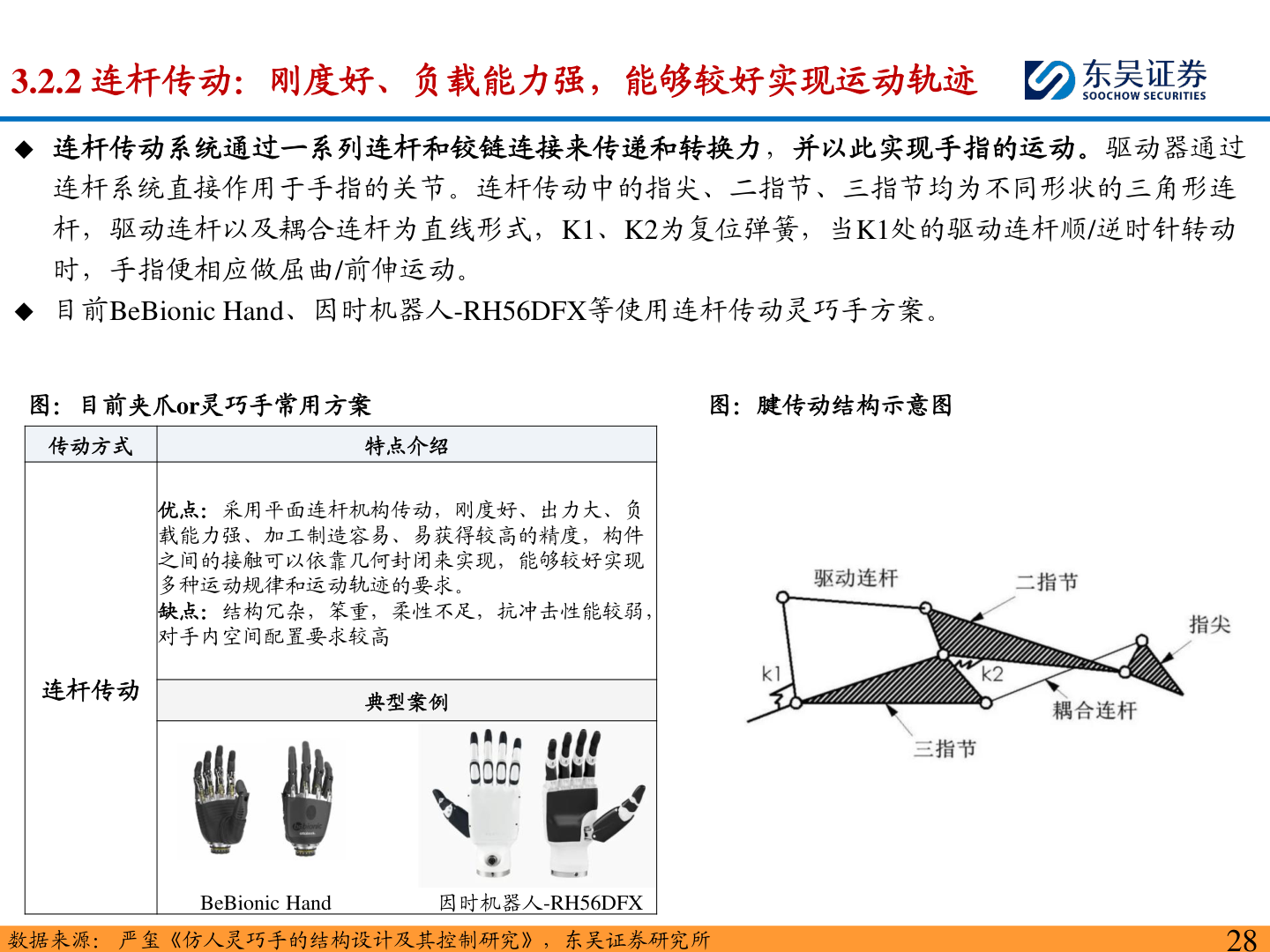
> 数据图表咨询下各位3.2.2 连杆传动:刚度好、负载能力强,能够较好实现运动轨迹2025-4-33.2.2 连杆传动:刚度好、负载能力强,能够较好实现运动轨迹◆ 连杆传动系统通过一系列连杆和铰链连接来传递和转换力,并以此实现手指的运动。驱动器通过连杆系统直接作用于手指的关节。连杆传动中的指尖、二指节、三指节均为不同形状的三角形连杆,驱动连杆以及耦合连杆为直线形式,K1、K2为复位弹簧,当K1处的驱动连杆顺/逆时针转动时,手指便相应做屈曲/前伸运动。◆ 目前BeBionic Hand、因时机器人-RH56DFX等使用连杆传动灵巧手方案。图:目前夹爪or灵巧手常用方案传动方式特点介绍图:腱传动结构示意图优点:采用平面连杆机构传动,刚度好、出力大、负载能力强、加工制造容易、易获得较高的精度,构件之间的接触可以依靠几何封闭来实现,能够较好实现多种运动规律和运动轨迹的要求。缺点:结构冗杂,笨重,柔性不足,抗冲击性能较弱,对手内空间配置要求较高连杆传动典型案例BeBionic Hand 因时机器人-RH56DFX数据来源: 严玺《仿人灵巧手的结构设计及其控制研究》,东吴证券研究所28东吴证券综合其他