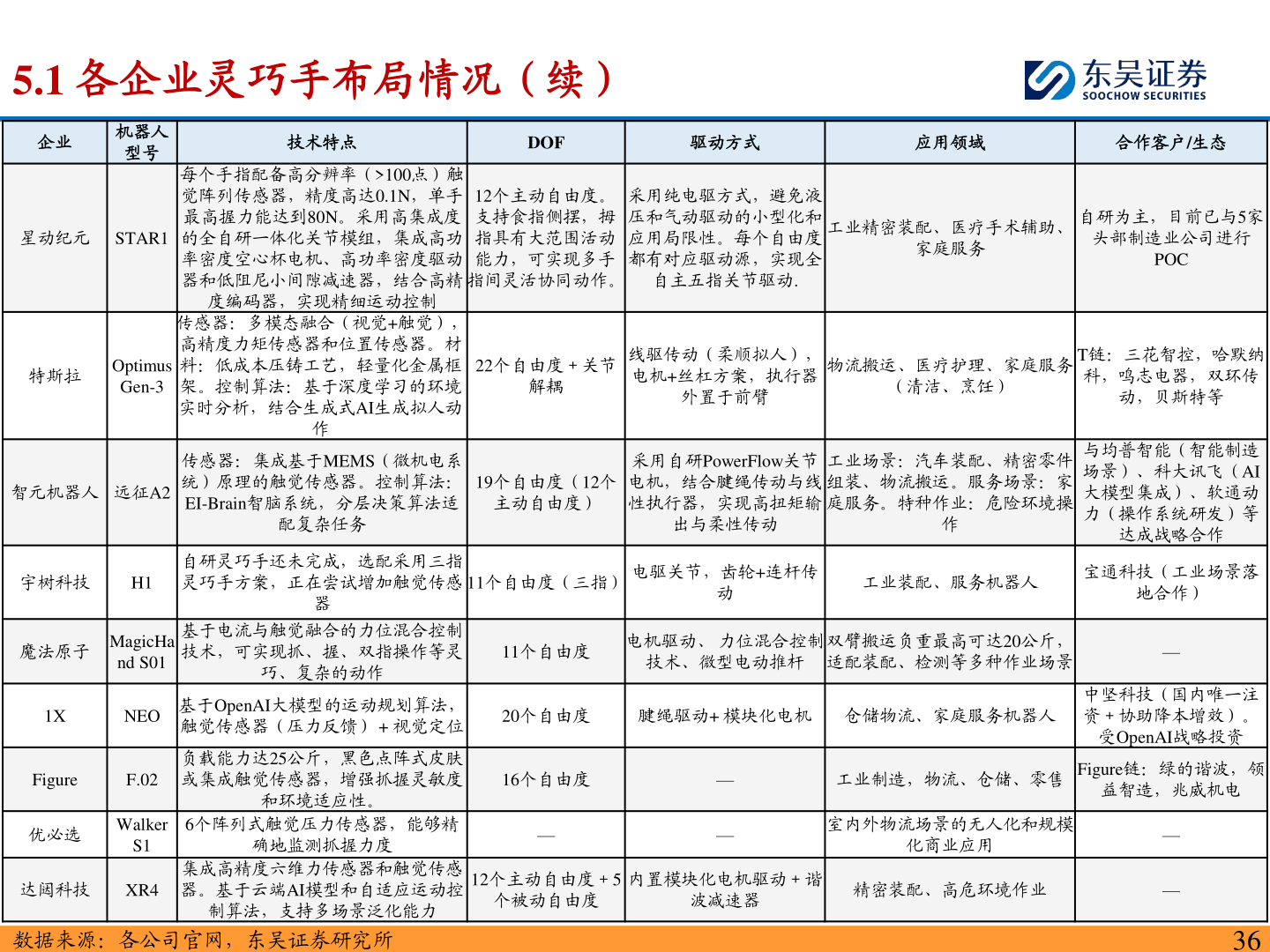
> 数据图表怎样理解5.1 各企业灵巧手布局情况(续)2025-4-35.1 各企业灵巧手布局情况(续)企业机器人型号星动纪元 STAR1技术特点DOF驱动方式应用领域合作客户/生态每个手指配备高分辨率(>100点)触觉阵列传感器,精度高达0.1N,单手最高握力能达到80N。采用高集成度的全自研一体化关节模组,集成高功率密度空心杯电机、高功率密度驱动器和低阻尼小间隙减速器,结合高精度编码器,实现精细运动控制12个主动自由度。支持食指侧摆,拇指具有大范围活动能力,可实现多手指间灵活协同动作。采用纯电驱方式,避免液压和气动驱动的小型化和应用局限性。每个自由度都有对应驱动源,实现全自主五指关节驱动.工业精密装配、医疗手术辅助、家庭服务自研为主,目前已与5家头部制造业公司进行POC特斯拉 Optimus Gen-3传感器:多模态融合(视觉+触觉),高精度力矩传感器和位置传感器。材料:低成本压铸工艺,轻量化金属框架。控制算法:基于深度学习的环境实时分析,结合生成式AI生成拟人动作22个自由度+关节解耦线驱传动(柔顺拟人),电机+丝杠方案,执行器外置于前臂物流搬运、医疗护理、家庭服务(清洁、烹饪)T链:三花智控,哈默纳科,鸣志电器,双环传动,贝斯特等智元机器人 远征A2传感器:集成基于MEMS(微机电系统)原理的触觉传感器。控制算法:EI-Brain智脑系统,分层决策算法适19个自由度(12个主动自由度)采用自研PowerFlow关节电机,结合腱绳传动与线性执行器,实现高扭矩输工业场景:汽车装配、精密零件组装、物流搬运。服务场景:家庭服务。特种作业:危险环境操配复杂任务出与柔性传动作与均普智能(智能制造场景)、科大讯飞(AI大模型集成)、软通动力(操作系统研发)等达成战略合作宝通科技(工业场景落地合作)宇树科技H1自研灵巧手还未完成,选配采用三指灵巧手方案,正在尝试增加触觉传感器魔法原子 MagicHand S01基于电流与触觉融合的力位混合控制技术,可实现抓、握、双指操作等灵巧、复杂的动作1XNEO基于OpenAI大模型的运动规划算法,触觉传感器(压力反馈) + 视觉定位11个自由度(三指)电驱关节,齿轮+连杆传动工业装配、服务机器人11个自由度电机驱动、 力位混合控制技术、微型电动推杆双臂搬运负重最高可达20公斤,适配装配、检测等多种作业场景—20个自由度腱绳驱动+ 模块化电机 仓储物流、家庭服务机器人中坚科技(国内唯一注资+协助降本增效)。受OpenAI战略投资FigureF.02负载能力达25公斤,黑色点阵式皮肤或集成触觉传感器,增强抓握灵敏度16个自由度和环境适应性。优必选 WalkerS16个阵列式触觉压力传感器,能够精确地监测抓握力度———工业制造,物流、仓储、零售 Figure链:绿的谐波,领益智造,兆威机电室内外物流场景的无人化和规模化商业应用达闼科技XR4集成高精度六维力传感器和触觉传感器。基于云端AI模型和自适应运动控制算法,支持多场景泛化能力数据来源:各公司官网,东吴证券研究所12个主动自由度+5内置模块化电机驱动+谐个被动自由度波减速器精密装配、高危环境作业——36东吴证券综合其他