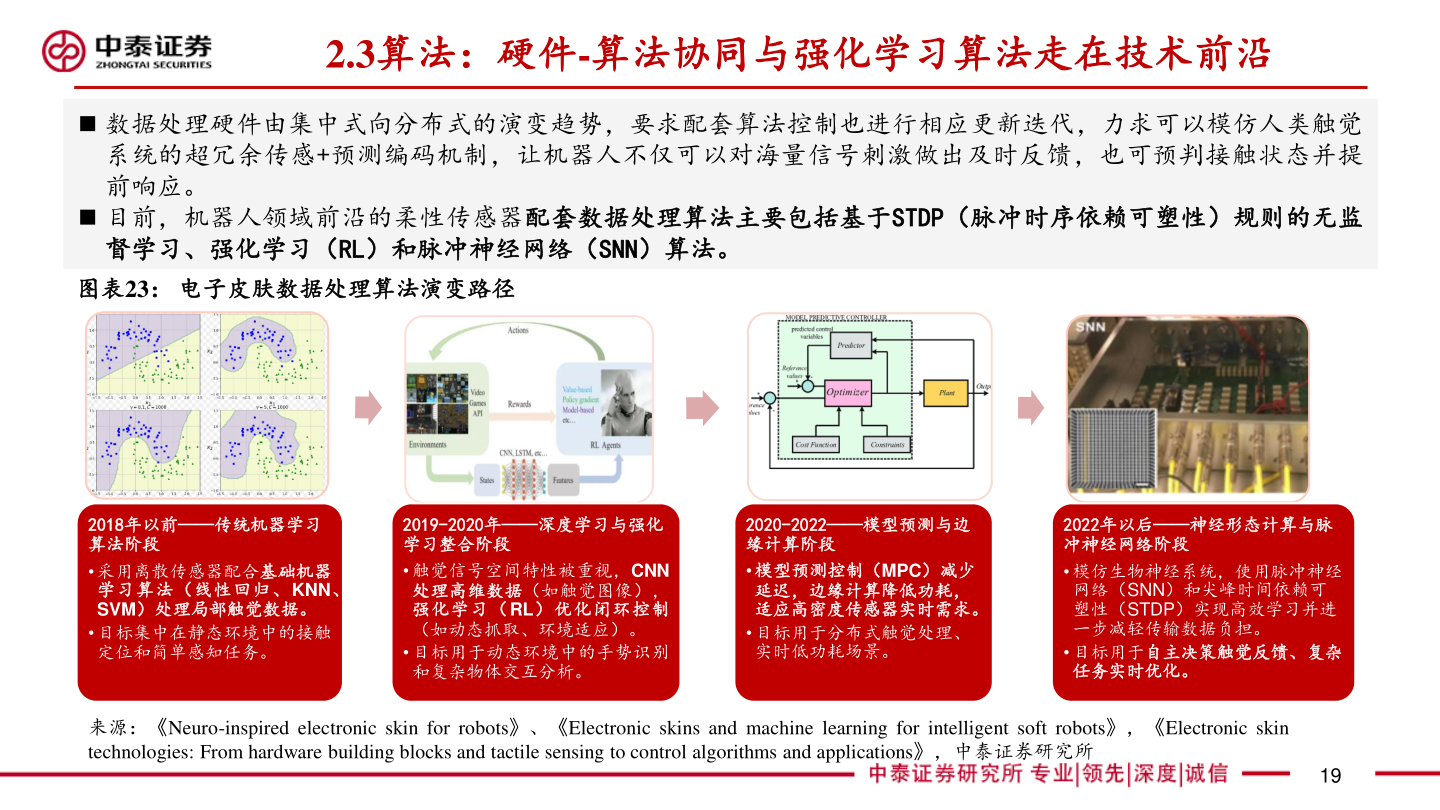
2.3算法:硬件-算法协同与强化学习算法走在技术前沿◼ 数据处理硬件由集中式向分布式的演变趋势,要求配套算法控制也进行相应更新迭代,力求可以模仿人类触觉系统的超冗余传感+预测编码机制,让机器人不仅可以对海量信号刺激做出及时反馈,也可预判接触状态并提前响应。◼ 目前,机器人领域前沿的柔性传感器配套数据处理算法主要包括基于STDP(脉冲时序依赖可塑性)规则的无监督学习、强化学习(RL)和脉冲神经网络(SNN)算法。图表23: 电子皮肤数据处理算法演变路径2018年以前——传统机器学习算法阶段• 采用离散传感器配合基础机器学习算法(线性回归、KNN、SVM)处理局部触觉数据。• 目标集中在静态环境中的接触定位和简单感知任务。2019-2020年——深度学习与强化学习整合阶段• 触觉信号空间特性被重视,CNN处理高维数据(如触觉图像),强化学习( RL)优化闭环控制(如动态抓取、环境适应)。• 目标用于动态环境中的手势识别和复杂物体交互分析。2020-2022——模型预测与边缘计算阶段• 模型预测控制(MPC)减少延迟,边缘计算降低功耗,适应高密度传感器实时需求。• 目标用于分布式触觉处理、实时低功耗场景。2022年以后——神经形态计算与脉冲神经网络阶段• 模仿生物神经系统,使用脉冲神经网络(SNN)和尖峰时间依赖可塑性(STDP)实现高效学习并进一步减轻传输数据负担。• 目标用于自主决策触觉反馈、复杂任务实时优化。来源:《Neuro-inspired electronic skin for robots》、《Electronic skins and machine learning for intelligent soft robots》,《Electronic skintechnologies: From hardware building blocks and tactile sensing to control algorithms and applications》,中泰证券研究所19