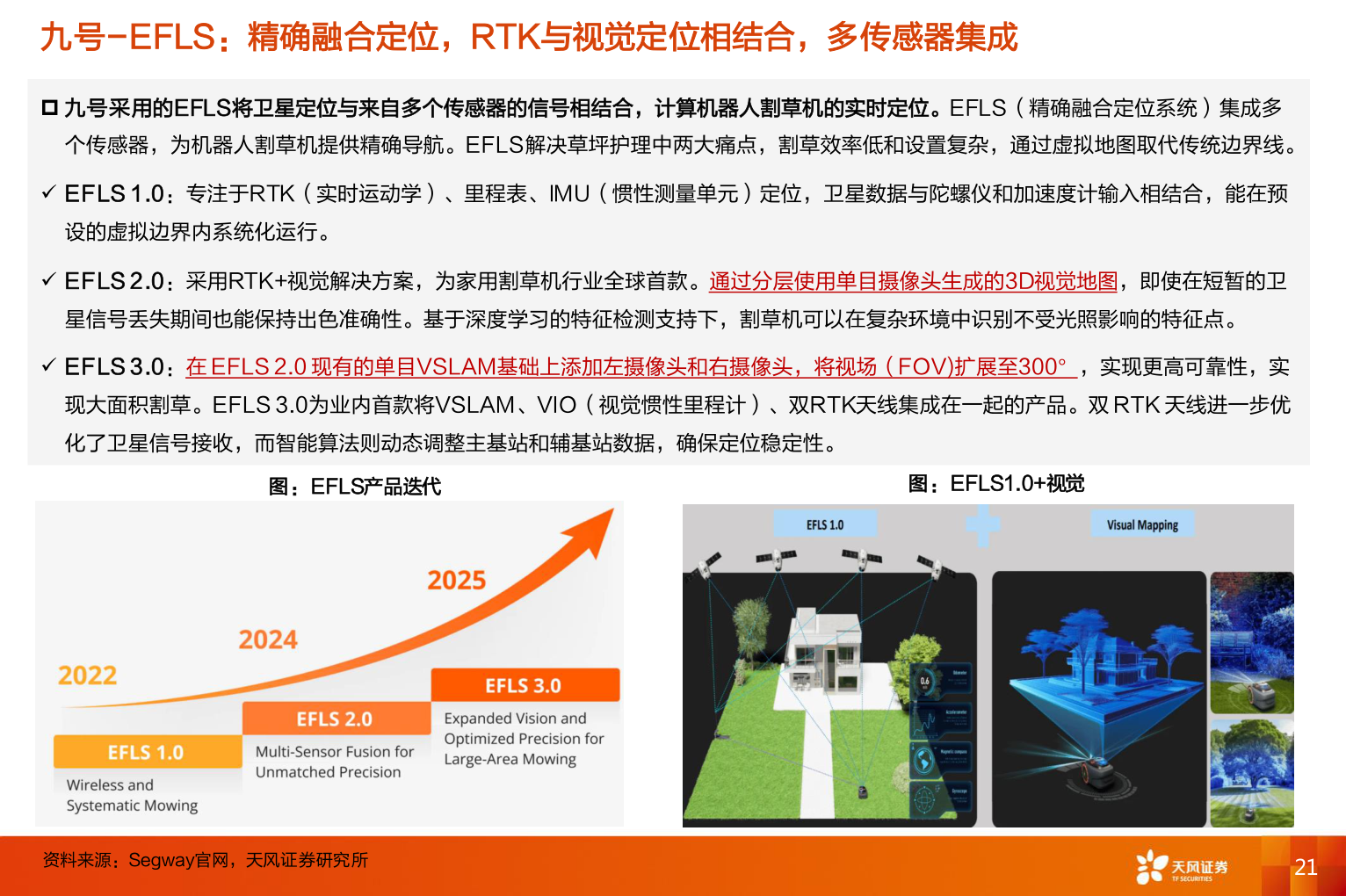
> 数据图表如何了解九号-EFLS:精确融合定位,RTK与视觉定位相结合,多传感器集成2025-4-0九号-EFLS:精确融合定位,RTK与视觉定位相结合,多传感器集成 九号采用的EFLS将卫星定位与来自多个传感器的信号相结合,计算机器人割草机的实时定位。EFLS(精确融合定位系统)集成多个传感器,为机器人割草机提供精确导航。EFLS解决草坪护理中两大痛点,割草效率低和设置复杂,通过虚拟地图取代传统边界线。✓ EFLS 1.0:专注于RTK(实时运动学)、里程表、IMU(惯性测量单元)定位,卫星数据与陀螺仪和加速度计输入相结合,能在预设的虚拟边界内系统化运行。✓ EFLS 2.0:采用RTK+视觉解决方案,为家用割草机行业全球首款。通过分层使用单目摄像头生成的3D视觉地图,即使在短暂的卫星信号丢失期间也能保持出色准确性。基于深度学习的特征检测支持下,割草机可以在复杂环境中识别不受光照影响的特征点。✓ EFLS 3.0:在 EFLS 2.0 现有的单目VSLAM基础上添加左摄像头和右摄像头,将视场(FOV)扩展至300°,实现更高可靠性,实现大面积割草。EFLS 3.0为业内首款将VSLAM、VIO(视觉惯性里程计)、双RTK天线集成在一起的产品。双 RTK 天线进一步优化了卫星信号接收,而智能算法则动态调整主基站和辅基站数据,确保定位稳定性。图:EFLS产品迭代图:EFLS1.0+视觉资料来源:Segway官网,天风证券研究所21天风证券农林牧渔