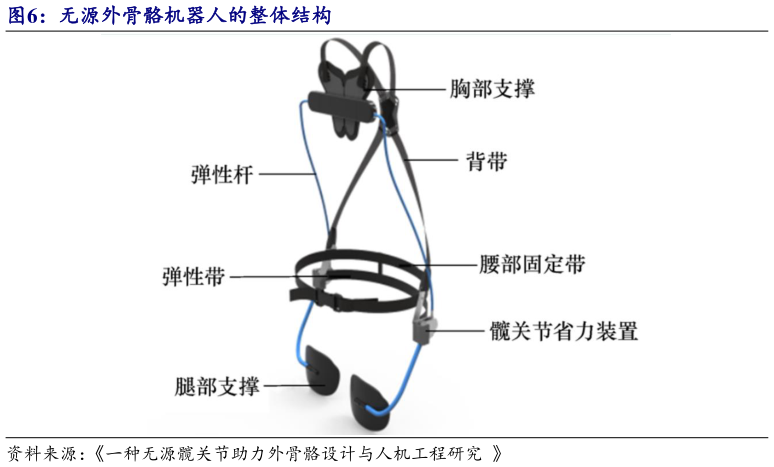
> 数据图表咨询下各位无源外骨骼机器人的整体结构2025-5-1无源外骨骼结构相对简单,完全依赖机械结构和材料特性提供助力,例如碳纤维弹簧储能、杠杆原理或气动装置。无源外骨骼不使用电源,利用弹簧、杠杆、气动或碳纤维等材料在形变时储存能量,并在恢复形状时释放能量。无源外骨骼主要由机械支架、无动力弹性元件及连接件构成,分别对应于人体骨骼肌中的骨骼、肌肉和肌腱,是仿生学、动力学和机械工程的结合。由于质量重会导致运动不协调及能量消耗多,因此要保证外骨骼结构紧凑、材料的强度高密度低,满足轻量化的使用要求。目前无动力外骨骼中常采用流体弹簧、涡卷弹簧、形状记忆合金、弹性软体材料等。无源外骨骼的工作原理是利用人体运动中被动消耗的能量。运动中被动消耗的能量,通过适当地力传递与能量储存,并在运动中需要人体肌肉做出正功的时候释放这些能量、输出助力,就能减轻人体肌肉负荷,从而省力。以程天科技易行无源外骨骼产品 EasyGo 为例,其将产品价格从万元级降至 2500 元,采用碳纤维增强尼龙复合材料,整机重量不到 2.5 公斤。这类产品主要面向 C 端市场,如景区租赁或家庭康复。无源外骨骼的创新方向集中在材料轻量化和机械设计优化。开源证券综合其他