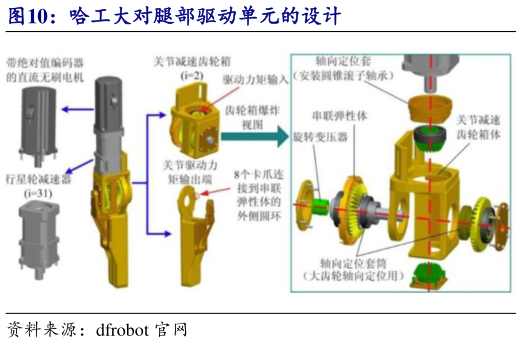
> 数据图表谁知道哈工大对腿部驱动单元的设计2025-5-1目前常用的外骨骼驱动方式有电动机、液压、气压三种,以电机驱动为主。随着同步电动机、伺服电动机以及减速器的发展,复杂模块简单化,电动机驱动系统的功率质量比也在逐渐提高,因此外骨骼多采用电动机驱动系统。如 Ekso Bionics外骨骼采用高性能无刷电动机配合行星减速器与蜗轮蜗杆减速器二级减速ReWalk外骨骼采用高性能无刷电动机配合行星减速器与正交锥齿轮减速器二级减速HAL-5 外骨骼采用盘式电动机组合谐波减速器一级减速。电机是装配在关节处直接提供关节力矩的设备,其主要可分为伺服电机、步进电机。伺服电机(医疗级首选)采用稀土永磁材料(如钕铁硼),功率密度达 3kWkg,扭矩范围 10-50Nm,配合行星齿轮减速器(传动效率 90%)实现角度控制精度0.1。步进电机(工业辅助场景)成本低、抗干扰性强。对于部分应用场景可能会在关节处用到滚柱丝杆。直流伺服电机先通过减速器降低转速、增大力矩,然后通过联轴器将旋转运动传递给丝杠,丝杠带动丝母滑块在导向杆的导向作用下进行往复运动,从而带动各个关节进行屈伸运动。同时采用增量式编码器作为角度传感器检测角度的变化,用于后续的控制中。开源证券综合其他