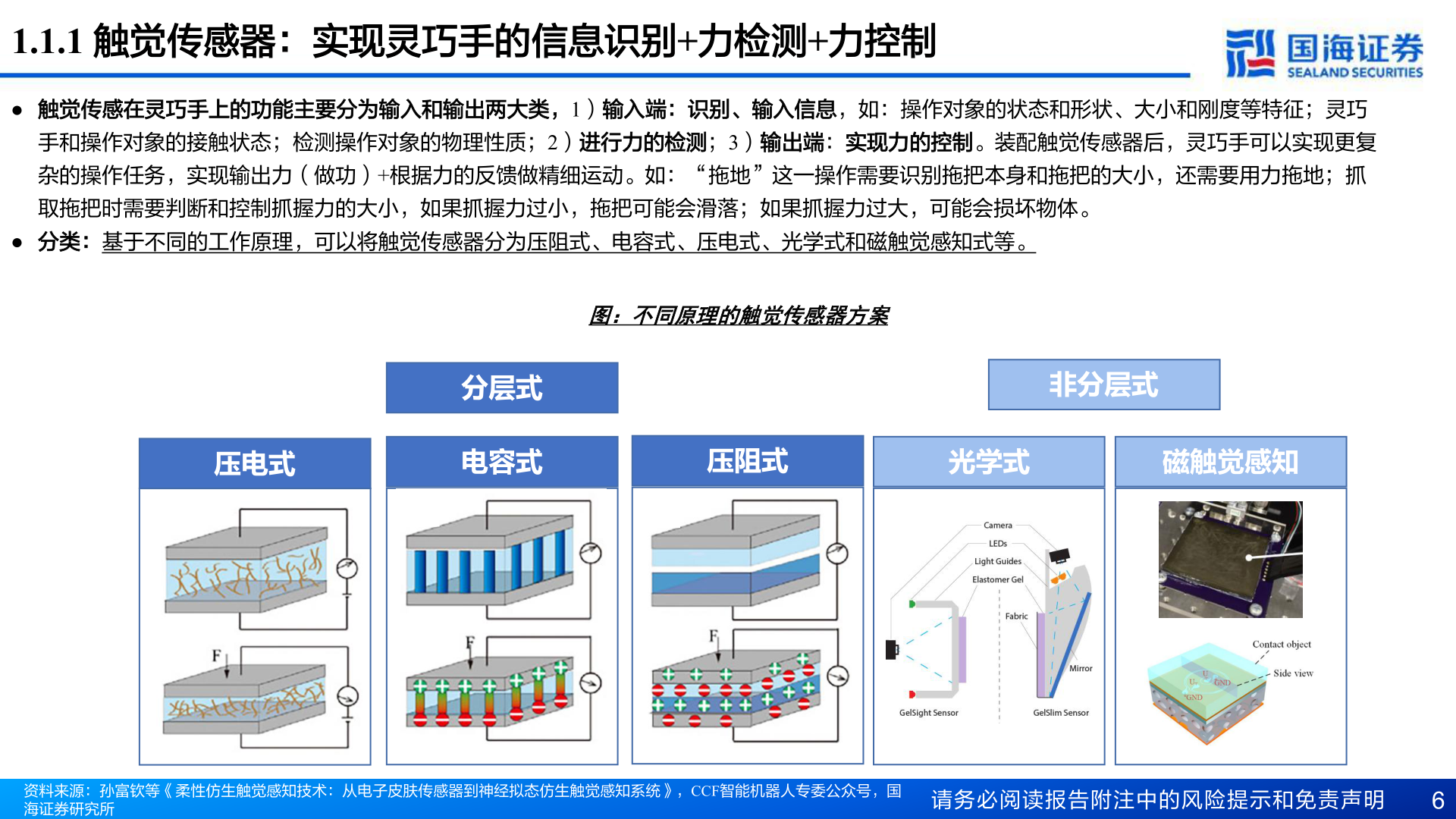
> 数据图表请问一下1.1.1 触觉传感器:实现灵巧手的信息识别+力检测+力控制2025-5-31.1.1 触觉传感器:实现灵巧手的信息识别+力检测+力控制● 触觉传感在灵巧手上的功能主要分为输入和输出两大类,1)输入端:识别、输入信息,如:操作对象的状态和形状、大小和刚度等特征;灵巧手和操作对象的接触状态;检测操作对象的物理性质;2)进行力的检测;3)输出端:实现力的控制。装配触觉传感器后,灵巧手可以实现更复杂的操作任务,实现输出力(做功)+根据力的反馈做精细运动。如:“拖地”这一操作需要识别拖把本身和拖把的大小,还需要用力拖地;抓取拖把时需要判断和控制抓握力的大小,如果抓握力过小,拖把可能会滑落;如果抓握力过大,可能会损坏物体。● 分类:基于不同的工作原理,可以将触觉传感器分为压阻式、电容式、压电式、光学式和磁触觉感知式等。图:不同原理的触觉传感器方案压电式分层式电容式非分层式压阻式光学式磁触觉感知资料来源:孙富钦等《柔性仿生触觉感知技术:从电子皮肤传感器到神经拟态仿生触觉感知系统》,CCF智能机器人专委公众号,国海证券研究所请务必阅读报告附注中的风险提示和免责声明6国海证券综合其他