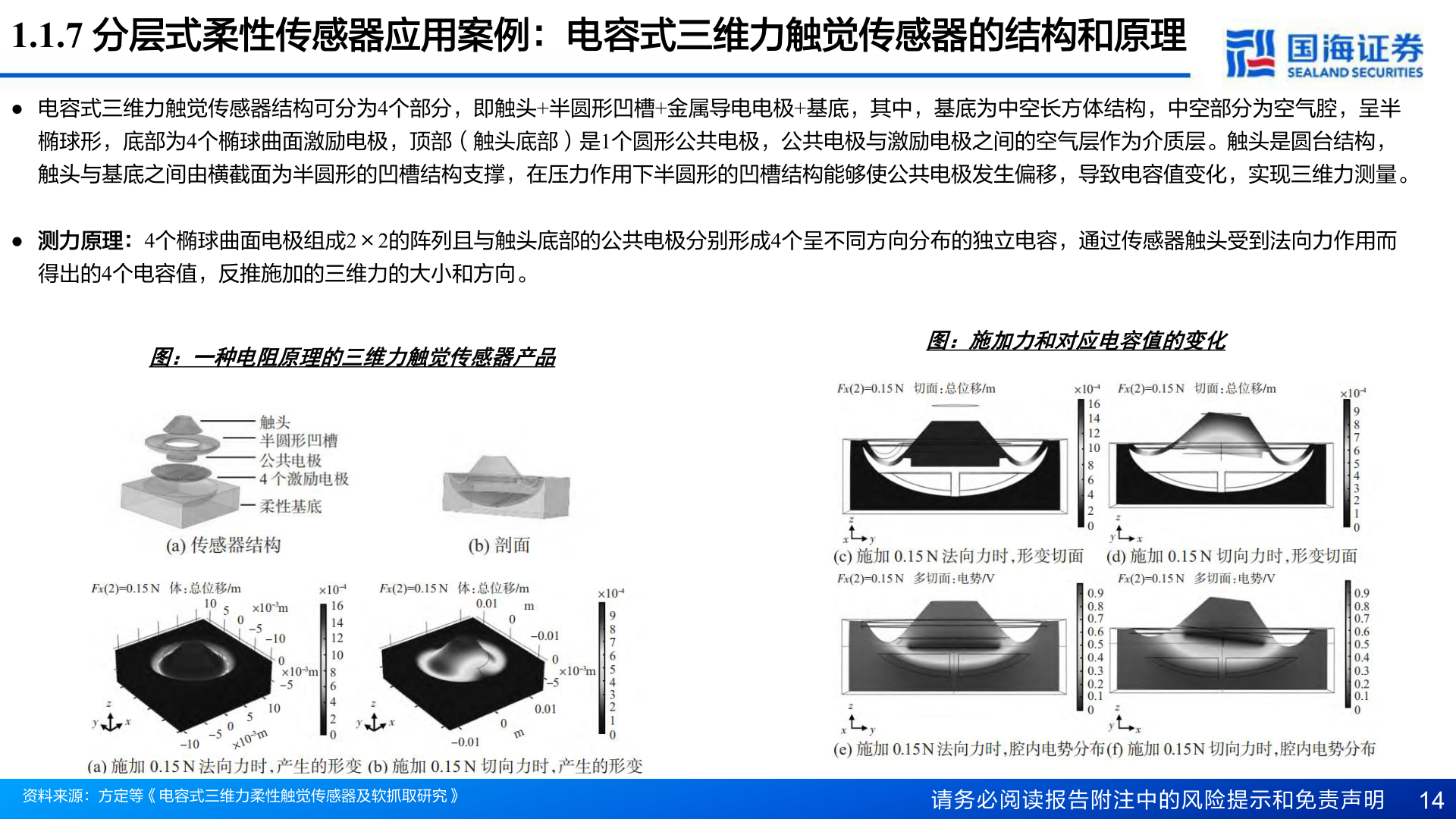
> 数据图表如何解释1.1.7 分层式柔性传感器应用案例:电容式三维力触觉传感器的结构和原理2025-5-31.1.7 分层式柔性传感器应用案例:电容式三维力触觉传感器的结构和原理● 电容式三维力触觉传感器结构可分为4个部分,即触头+半圆形凹槽+金属导电电极+基底,其中,基底为中空长方体结构,中空部分为空气腔,呈半椭球形,底部为4个椭球曲面激励电极,顶部(触头底部)是1个圆形公共电极,公共电极与激励电极之间的空气层作为介质层。触头是圆台结构,触头与基底之间由横截面为半圆形的凹槽结构支撑,在压力作用下半圆形的凹槽结构能够使公共电极发生偏移,导致电容值变化,实现三维力测量。● 测力原理:4个椭球曲面电极组成2×2的阵列且与触头底部的公共电极分别形成4个呈不同方向分布的独立电容,通过传感器触头受到法向力作用而得出的4个电容值,反推施加的三维力的大小和方向。图:一种电阻原理的三维力触觉传感器产品图:施加力和对应电容值的变化资料来源:方定等《电容式三维力柔性触觉传感器及软抓取研究》请务必阅读报告附注中的风险提示和免责声明 14国海证券综合其他