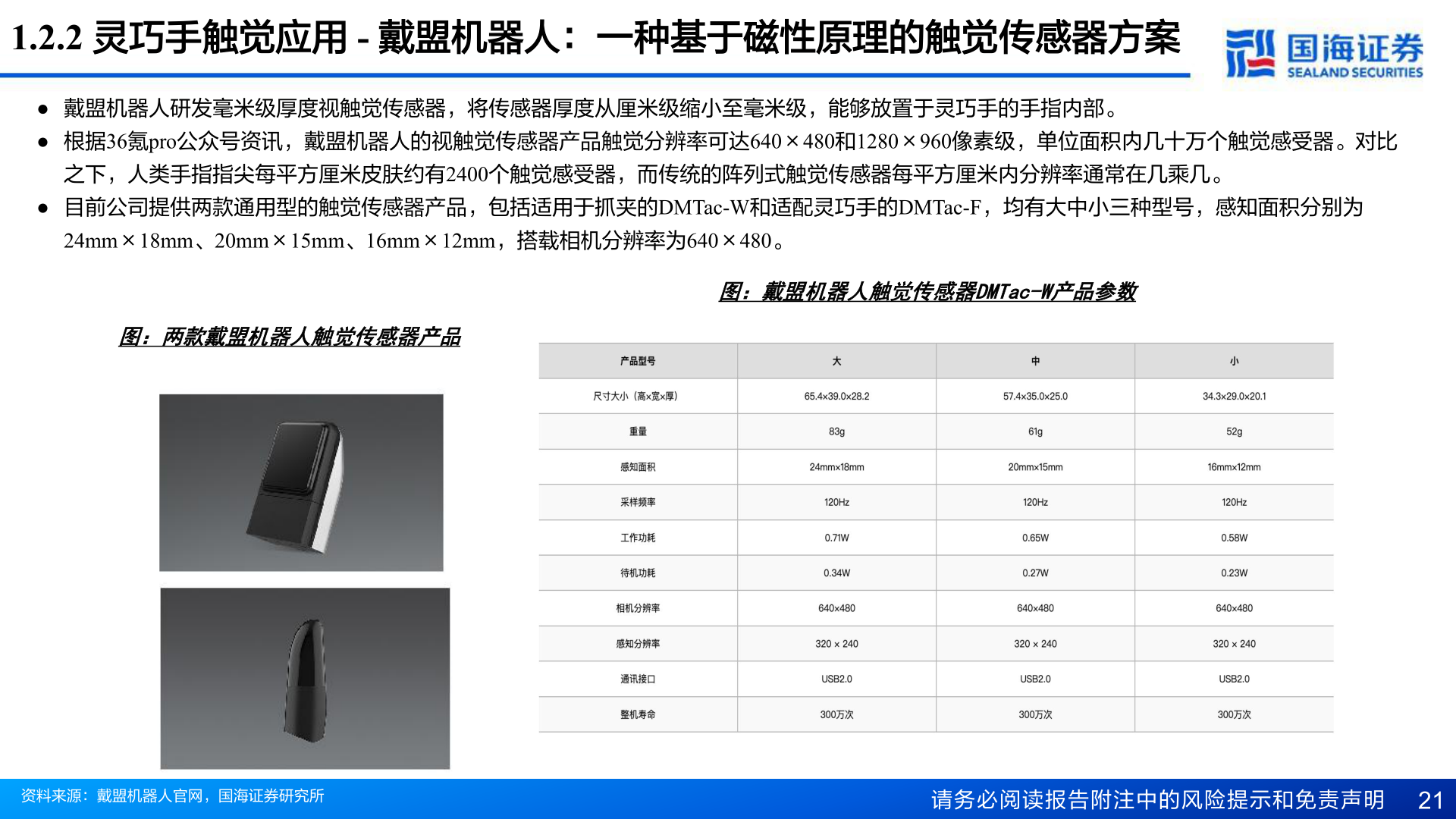
> 数据图表你知道1.2.2 灵巧手触觉应用 - 戴盟机器人:一种基于磁性原理的触觉传感器方案2025-5-31.2.2 灵巧手触觉应用 - 戴盟机器人:一种基于磁性原理的触觉传感器方案● 戴盟机器人研发毫米级厚度视触觉传感器,将传感器厚度从厘米级缩小至毫米级,能够放置于灵巧手的手指内部。● 根据36氪pro公众号资讯,戴盟机器人的视触觉传感器产品触觉分辨率可达640×480和1280×960像素级,单位面积内几十万个触觉感受器。对比之下,人类手指指尖每平方厘米皮肤约有2400个触觉感受器,而传统的阵列式触觉传感器每平方厘米内分辨率通常在几乘几。● 目前公司提供两款通用型的触觉传感器产品,包括适用于抓夹的DMTac-W和适配灵巧手的DMTac-F,均有大中小三种型号,感知面积分别为24mm×18mm、20mm×15mm、16mm×12mm,搭载相机分辨率为640×480。图:两款戴盟机器人触觉传感器产品图:戴盟机器人触觉传感器DMTac-W产品参数资料来源:戴盟机器人官网,国海证券研究所请务必阅读报告附注中的风险提示和免责声明 21国海证券综合其他