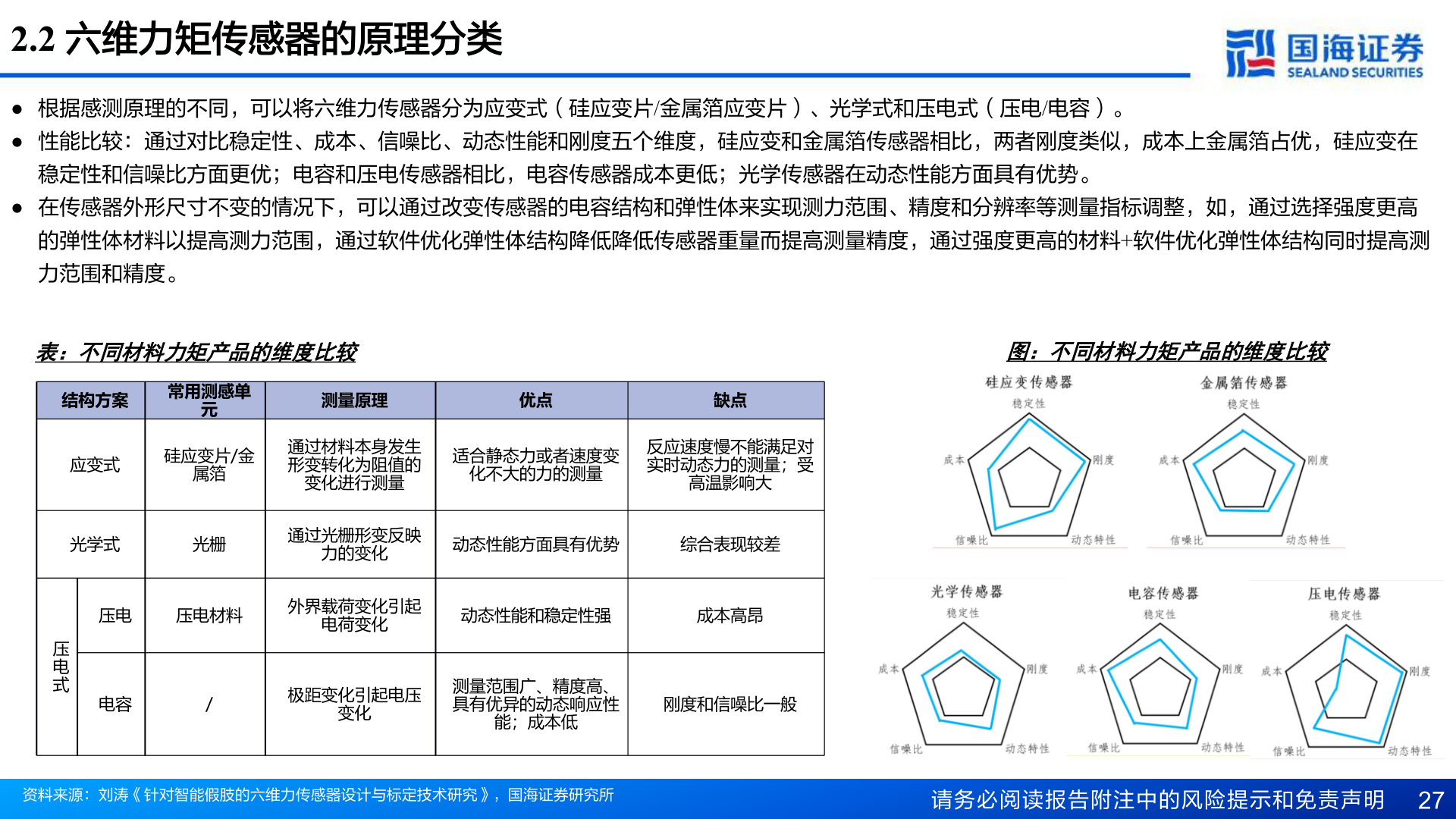
> 数据图表咨询下各位2.2 六维力矩传感器的原理分类2025-5-32.2 六维力矩传感器的原理分类● 根据感测原理的不同,可以将六维力传感器分为应变式(硅应变片/金属箔应变片)、光学式和压电式(压电/电容)。● 性能比较:通过对比稳定性、成本、信噪比、动态性能和刚度五个维度,硅应变和金属箔传感器相比,两者刚度类似,成本上金属箔占优,硅应变在稳定性和信噪比方面更优;电容和压电传感器相比,电容传感器成本更低;光学传感器在动态性能方面具有优势。● 在传感器外形尺寸不变的情况下,可以通过改变传感器的电容结构和弹性体来实现测力范围、精度和分辨率等测量指标调整,如,通过选择强度更高的弹性体材料以提高测力范围,通过软件优化弹性体结构降低降低传感器重量而提高测量精度,通过强度更高的材料+软件优化弹性体结构同时提高测力范围和精度。表:不同材料力矩产品的维度比较图:不同材料力矩产品的维度比较结构方案应变式常用测感单元硅应变片/金属箔光学式光栅压电压电材料测量原理优点缺点通过材料本身发生形变转化为阻值的变化进行测量通过光栅形变反映力的变化外界载荷变化引起电荷变化适合静态力或者速度变化不大的力的测量反应速度慢不能满足对实时动态力的测量;受高温影响大动态性能方面具有优势综合表现较差动态性能和稳定性强成本高昂压电式电容/极距变化引起电压变化测量范围广、精度高、具有优异的动态响应性能;成本低刚度和信噪比一般资料来源:刘涛《针对智能假肢的六维力传感器设计与标定技术研究》,国海证券研究所请务必阅读报告附注中的风险提示和免责声明 27国海证券综合其他