> 数据图表如何解释腱绳传动结构及原理
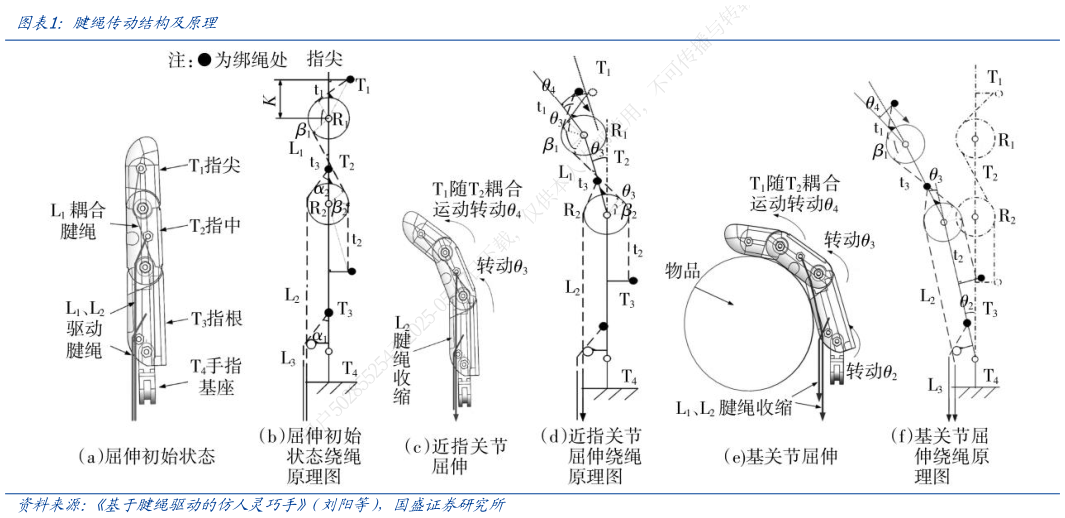
2025-5-2机器人灵巧手传动方式主要包括传统连杆、齿轮传动、腱绳传动,对于灵巧手抓取能力影响显著。机械传动直接影响到灵巧手的抓取稳定性、灵活性及产业化成本。灵巧手的主要传动方式包括连杆传动、齿轮传动、腱绳传动三种。其中,腱绳传动对于空间狭小、传动精密的灵巧手空间设计较为友好,关键在于腱绳材料的选择连杆、齿轮等传动方式更为直接,但对空间、设计的要求较高: 腱绳传动:机理是起到“肌腱”的作用,使用类似人类手指的腱和绳索结构,通过拉动或放松绳索来驱动手指的关节运动。一般电机通过齿轮箱驱动滚珠丝杠,通过滚珠丝杠上的螺母把旋转运动转换为直线运动,腱绳形成一个腱环套在螺母上,螺母拉动连接在灵巧手手指指骨上的腱绳,实现手指绕关节轴的转动运动。为避免腱绳之间的干扰,腱绳外侧采用外包裹导管的形式。线绳传动使得大型的驱动器远离了执行机构,减轻末端的负载和惯量,提升了抓取的速度。同时,腱绳传动布局灵活,适合空间狭小且需要驱动自由度数目较多的传动场合。