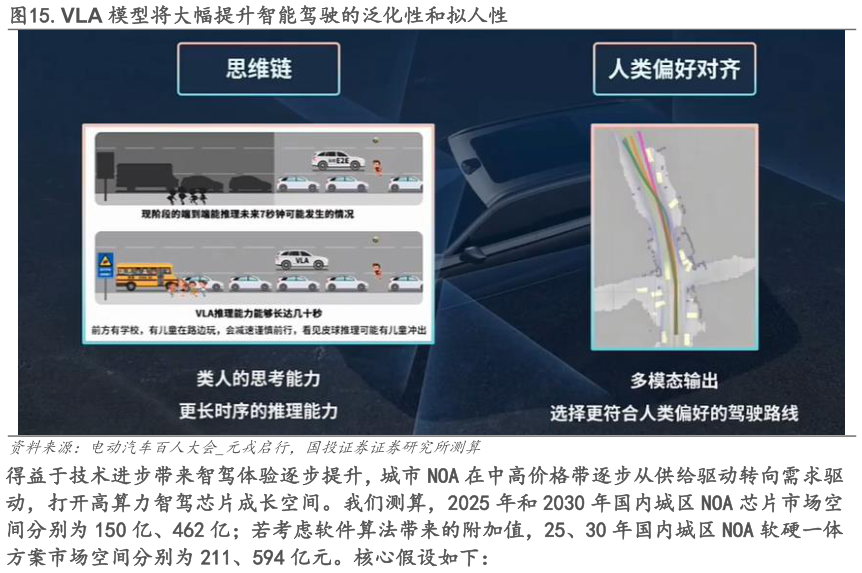
> 数据图表想问下各位网友.VLA 模型将大幅提升智能驾驶的泛化性和拟人性
2025-5-0基于数据驱动的端到端提升智驾模型的能力上限,驱动头部厂商城市 NOA 从能用到好用。此前 BEV Occ 时代,规控端仍然靠程序员手写规则,城区场景下仅一个十字路口可能就存在上百种交互场景,靠人类程序员手写规则无法穷尽,造成的结果就是通行效率低下。此外,由于传统分模块独立开发的架构下,不同模块之间的接口由人工定义,感知输出的信息是人工定义的显式抽象(比如车道线、障碍物等),但现实中可能存在难以充分表达但会影响下游决策的因素,使得模型难以进行全局的调优。同时,模块之间的误差结果会累计,使得最终的输出结果有较大的偏差。端到端范式下,规控端同样切换到神经网络,大幅提高城区场景下城市 NOA 的通行能力同时,端到端架构使得智能驾驶进入纯数据驱动时代,模型全局调优的上限更高、主机厂通过数据闭环解 corner case 的速度更快。24 年下半年开始,国内头部厂商端到端智驾系统陆续上车,在全国无图都能开的基础上初步实现“好开”,如环岛、掉头等复杂场景覆盖度大幅提升。