> 数据图表如何了解1.1
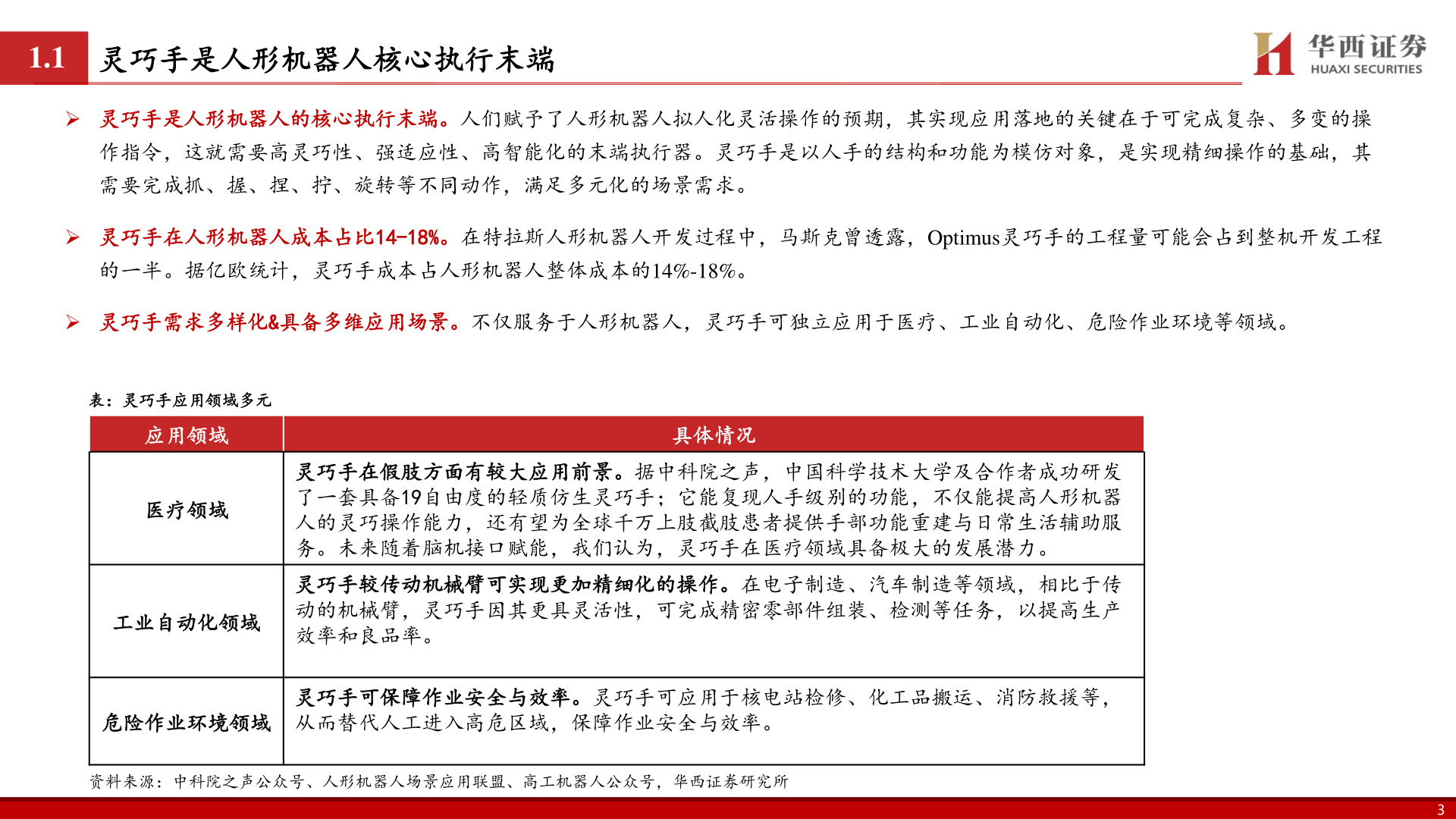
2025-5-21.1灵巧手是人形机器人核心执行末端 灵巧手是人形机器人的核心执行末端。人们赋予了人形机器人拟人化灵活操作的预期,其实现应用落地的关键在于可完成复杂、多变的操作指令,这就需要高灵巧性、强适应性、高智能化的末端执行器。灵巧手是以人手的结构和功能为模仿对象,是实现精细操作的基础,其需要完成抓、握、捏、拧、旋转等不同动作,满足多元化的场景需求。 灵巧手在人形机器人成本占比14-18%。在特拉斯人形机器人开发过程中,马斯克曾透露,Optimus灵巧手的工程量可能会占到整机开发工程的一半。据亿欧统计,灵巧手成本占人形机器人整体成本的14%-18%。 灵巧手需求多样化&具备多维应用场景。不仅服务于人形机器人,灵巧手可独立应用于医疗、工业自动化、危险作业环境等领域。表:灵巧手应用领域多元应用领域医疗领域具体情况灵巧手在假肢方面有较大应用前景。据中科院之声,中国科学技术大学及合作者成功研发了一套具备19自由度的轻质仿生灵巧手;它能复现人手级别的功能,不仅能提高人形机器人的灵巧操作能力,还有望为全球千万上肢截肢患者提供手部功能重建与日常生活辅助服务。未来随着脑机接口赋能,我们认为,灵巧手在医疗领域具备极大的发展潜力。工业自动化领域灵巧手较传动机械臂可实现更加精细化的操作。在电子制造、汽车制造等领域,相比于传动的机械臂,灵巧手因其更具灵活性,可完成精密零部件组装、检测等任务,以提高生产效率和良品率。危险作业环境领域灵巧手可保障作业安全与效率。灵巧手可应用于核电站检修、化工品搬运、消防救援等,从而替代人工进入高危区域,保障作业安全与效率。资料来源:中科院之声公众号、人形机器人场景应用联盟、高工机器人公众号,华西证券研究所3