> 数据图表如何看待2.2.1
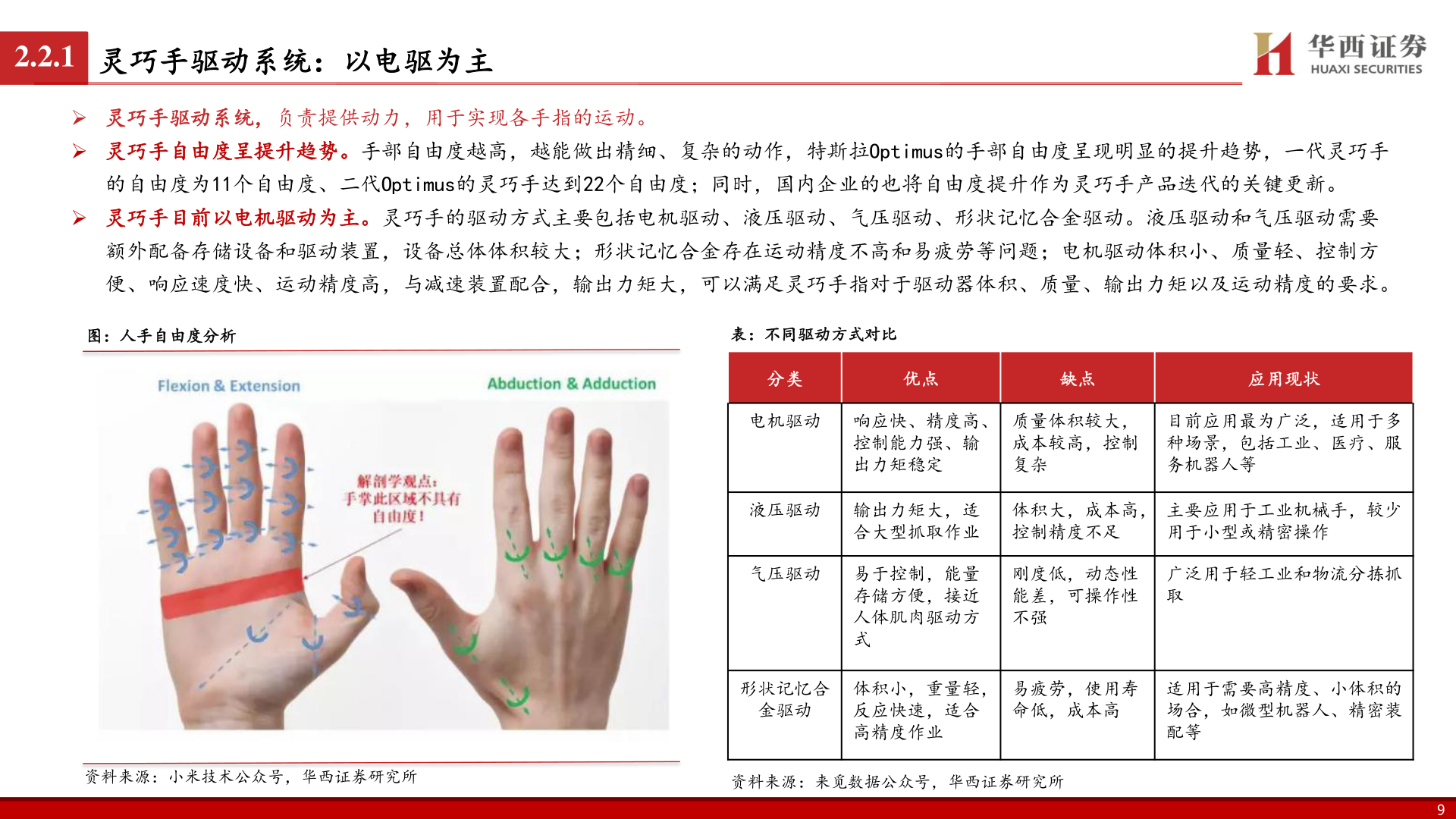
2025-5-22.2.1灵巧手驱动系统:以电驱为主 灵巧手驱动系统,负责提供动力,用于实现各手指的运动。 灵巧手自由度呈提升趋势。手部自由度越高,越能做出精细、复杂的动作,特斯拉Optimus的手部自由度呈现明显的提升趋势,一代灵巧手的自由度为11个自由度、二代Optimus的灵巧手达到22个自由度;同时,国内企业的也将自由度提升作为灵巧手产品迭代的关键更新。 灵巧手目前以电机驱动为主。灵巧手的驱动方式主要包括电机驱动、液压驱动、气压驱动、形状记忆合金驱动。液压驱动和气压驱动需要额外配备存储设备和驱动装置,设备总体体积较大;形状记忆合金存在运动精度不高和易疲劳等问题;电机驱动体积小、质量轻、控制方便、响应速度快、运动精度高,与减速装置配合,输出力矩大,可以满足灵巧手指对于驱动器体积、质量、输出力矩以及运动精度的要求。图:人手自由度分析表:不同驱动方式对比分类优点缺点应用现状电机驱动 响应快、精度高、控制能力强、输出力矩稳定质量体积较大,成本较高,控制复杂目前应用最为广泛,适用于多种场景,包括工业、医疗、服务机器人等液压驱动 输出力矩大,适合大型抓取作业体积大,成本高,控制精度不足主要应用于工业机械手,较少用于小型或精密操作气压驱动 易于控制,能量存储方便,接近人体肌肉驱动方式刚度低,动态性能差,可操作性不强广泛用于轻工业和物流分拣抓取形状记忆合金驱动体积小,重量轻,反应快速,适合高精度作业易疲劳,使用寿命低,成本高适用于需要高精度、小体积的场合,如微型机器人、精密装配等资料来源:小米技术公众号,华西证券研究所资料来源:来觅数据公众号,华西证券研究所9