> 数据图表谁能回答2.2.1 灵巧手驱动系统:以电驱为主
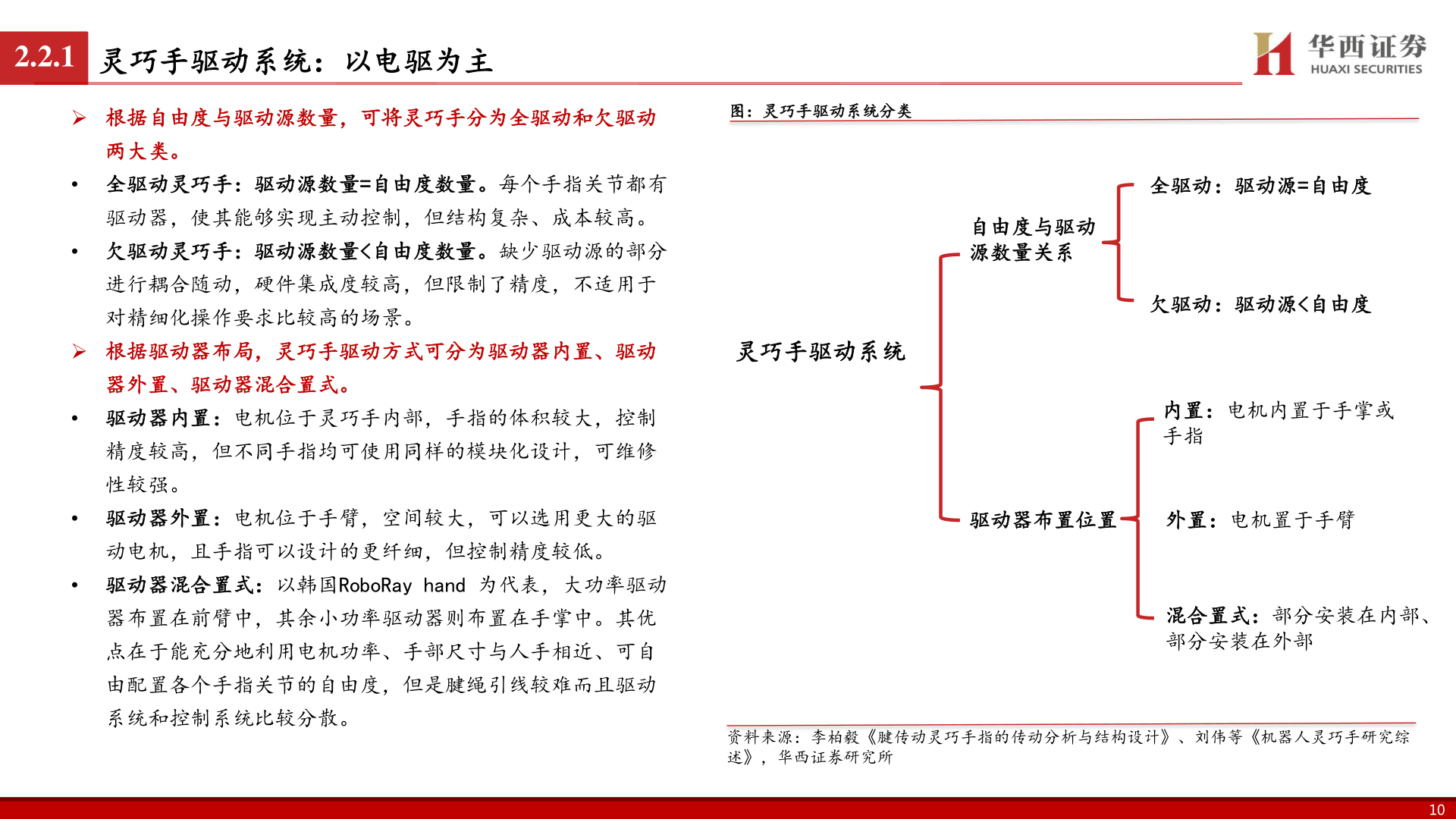
2025-5-22.2.1 灵巧手驱动系统:以电驱为主 根据自由度与驱动源数量,可将灵巧手分为全驱动和欠驱动图:灵巧手驱动系统分类两大类。• 全驱动灵巧手:驱动源数量=自由度数量。每个手指关节都有驱动器,使其能够实现主动控制,但结构复杂、成本较高。• 欠驱动灵巧手:驱动源数量<自由度数量。缺少驱动源的部分进行耦合随动,硬件集成度较高,但限制了精度,不适用于对精细化操作要求比较高的场景。 根据驱动器布局,灵巧手驱动方式可分为驱动器内置、驱动灵巧手驱动系统器外置、驱动器混合置式。• 驱动器内置:电机位于灵巧手内部,手指的体积较大,控制精度较高,但不同手指均可使用同样的模块化设计,可维修性较强。• 驱动器外置:电机位于手臂,空间较大,可以选用更大的驱动电机,且手指可以设计的更纤细,但控制精度较低。• 驱动器混合置式:以韩国RoboRay hand 为代表,大功率驱动器布置在前臂中,其余小功率驱动器则布置在手掌中。其优点在于能充分地利用电机功率、手部尺寸与人手相近、可自由配置各个手指关节的自由度,但是腱绳引线较难而且驱动系统和控制系统比较分散。自由度与驱动源数量关系全驱动:驱动源=自由度欠驱动:驱动源<自由度内置:电机内置于手掌或手指驱动器布置位置外置:电机置于手臂混合置式:部分安装在内部、部分安装在外部资料来源:李柏毅《腱传动灵巧手指的传动分析与结构设计》、刘伟等《机器人灵巧手研究综述》,华西证券研究所10