> 数据图表如何解释2.2.2
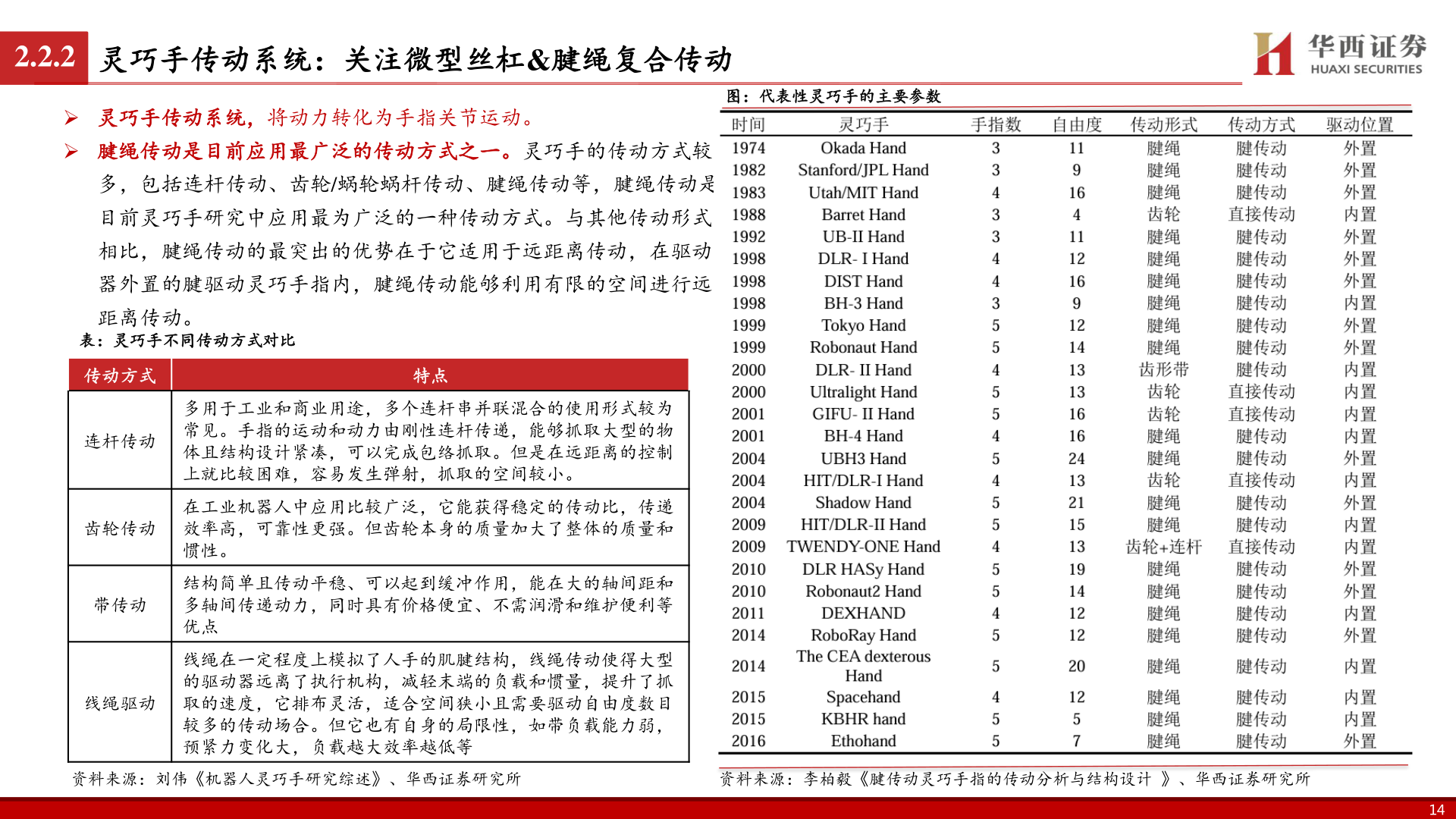
2025-5-22.2.2灵巧手传动系统:关注微型丝杠&腱绳复合传动图:代表性灵巧手的主要参数 灵巧手传动系统,将动力转化为手指关节运动。 腱绳传动是目前应用最广泛的传动方式之一。灵巧手的传动方式较多,包括连杆传动、齿轮/蜗轮蜗杆传动、腱绳传动等,腱绳传动是目前灵巧手研究中应用最为广泛的一种传动方式。与其他传动形式相比,腱绳传动的最突出的优势在于它适用于远距离传动,在驱动器外置的腱驱动灵巧手指内,腱绳传动能够利用有限的空间进行远距离传动。表:灵巧手不同传动方式对比传动方式连杆传动齿轮传动带传动线绳驱动特点多用于工业和商业用途,多个连杆串并联混合的使用形式较为常见。手指的运动和动力由刚性连杆传递,能够抓取大型的物体且结构设计紧凑,可以完成包络抓取。但是在远距离的控制上就比较困难,容易发生弹射,抓取的空间较小。在工业机器人中应用比较广泛,它能获得稳定的传动比,传递效率高,可靠性更强。但齿轮本身的质量加大了整体的质量和惯性。结构简单且传动平稳、可以起到缓冲作用,能在大的轴间距和多轴间传递动力,同时具有价格便宜、不需润滑和维护便利等优点线绳在一定程度上模拟了人手的肌腱结构,线绳传动使得大型的驱动器远离了执行机构,减轻末端的负载和惯量,提升了抓取的速度,它排布灵活,适合空间狭小且需要驱动自由度数目较多的传动场合。但它也有自身的局限性,如带负载能力弱,预紧力变化大,负载越大效率越低等资料来源:刘伟《机器人灵巧手研究综述》、华西证券研究所资料来源:李柏毅《腱传动灵巧手指的传动分析与结构设计 》、华西证券研究所14