> 数据图表请问一下2.2.2
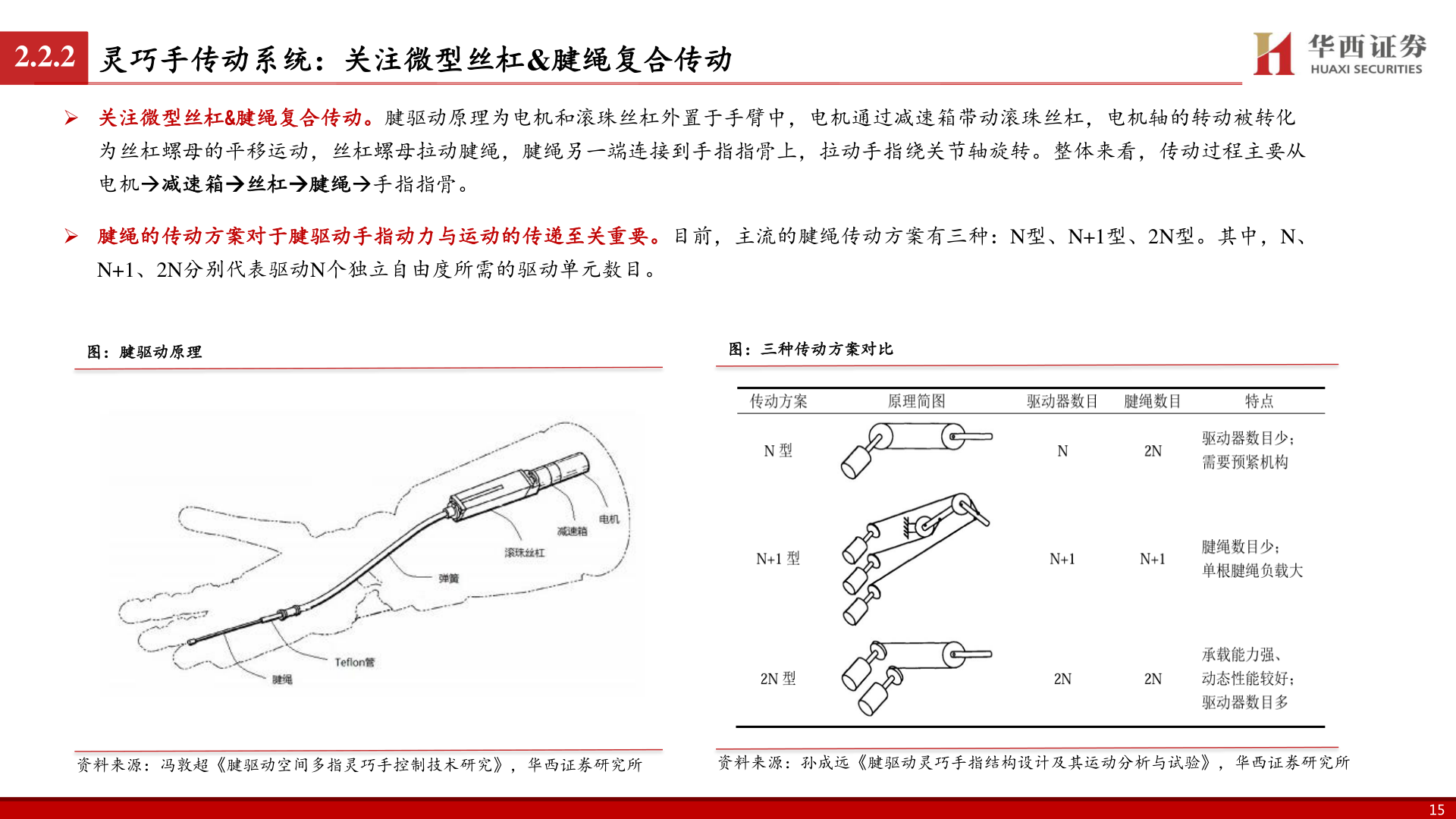
2025-5-22.2.2灵巧手传动系统:关注微型丝杠&腱绳复合传动 关注微型丝杠&腱绳复合传动。腱驱动原理为电机和滚珠丝杠外置于手臂中,电机通过减速箱带动滚珠丝杠,电机轴的转动被转化为丝杠螺母的平移运动,丝杠螺母拉动腱绳,腱绳另一端连接到手指指骨上,拉动手指绕关节轴旋转。整体来看,传动过程主要从电机减速箱丝杠腱绳手指指骨。 腱绳的传动方案对于腱驱动手指动力与运动的传递至关重要。目前,主流的腱绳传动方案有三种:N型、N+1型、2N型。其中,N、N+1、2N分别代表驱动N个独立自由度所需的驱动单元数目。图:腱驱动原理图:三种传动方案对比资料来源:冯敦超《腱驱动空间多指灵巧手控制技术研究》,华西证券研究所资料来源:孙成远《腱驱动灵巧手指结构设计及其运动分析与试验》,华西证券研究所15