> 数据图表咨询大家2.2.3
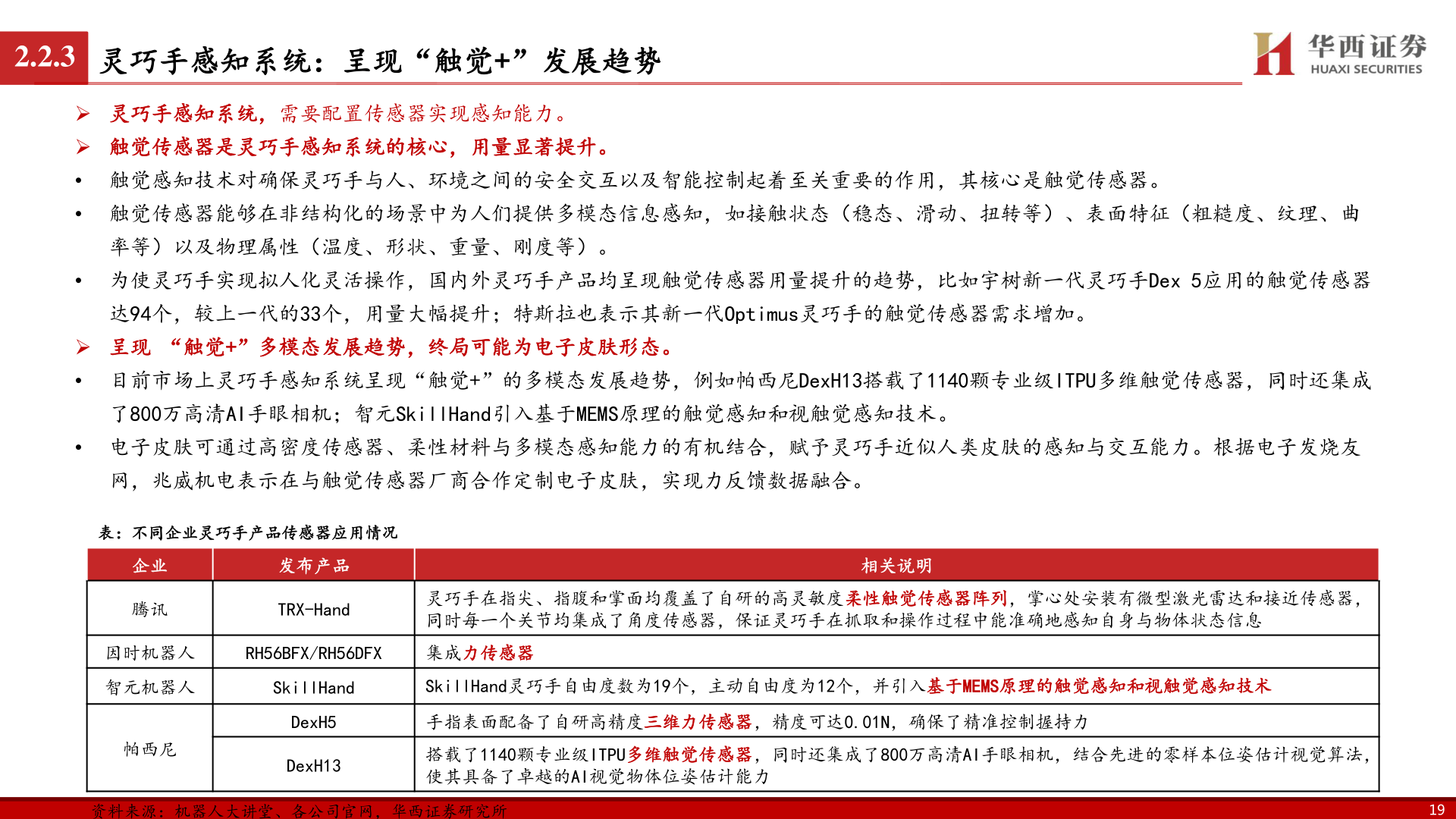
2025-5-22.2.3灵巧手感知系统:呈现“触觉+”发展趋势 灵巧手感知系统,需要配置传感器实现感知能力。 触觉传感器是灵巧手感知系统的核心,用量显著提升。• 触觉感知技术对确保灵巧手与人、环境之间的安全交互以及智能控制起着至关重要的作用,其核心是触觉传感器。• 触觉传感器能够在非结构化的场景中为人们提供多模态信息感知,如接触状态(稳态、滑动、扭转等)、表面特征(粗糙度、纹理、曲率等)以及物理属性(温度、形状、重量、刚度等)。• 为使灵巧手实现拟人化灵活操作,国内外灵巧手产品均呈现触觉传感器用量提升的趋势,比如宇树新一代灵巧手Dex 5应用的触觉传感器达94个,较上一代的33个,用量大幅提升;特斯拉也表示其新一代Optimus灵巧手的触觉传感器需求增加。 呈现 “触觉+”多模态发展趋势,终局可能为电子皮肤形态。• 目前市场上灵巧手感知系统呈现“触觉+”的多模态发展趋势,例如帕西尼DexH13搭载了1140颗专业级ITPU多维触觉传感器,同时还集成了800万高清AI手眼相机;智元SkillHand引入基于MEMS原理的触觉感知和视触觉感知技术。• 电子皮肤可通过高密度传感器、柔性材料与多模态感知能力的有机结合,赋予灵巧手近似人类皮肤的感知与交互能力。根据电子发烧友网,兆威机电表示在与触觉传感器厂商合作定制电子皮肤,实现力反馈数据融合。表:不同企业灵巧手产品传感器应用情况企业腾讯发布产品TRX-Hand灵巧手在指尖、指腹和掌面均覆盖了自研的高灵敏度柔性触觉传感器阵列,掌心处安装有微型激光雷达和接近传感器,同时每一个关节均集成了角度传感器,保证灵巧手在抓取和操作过程中能准确地感知自身与物体状态信息相关说明因时机器人RH56BFX/RH56DFX集成力传感器智元机器人SkillHandSkillHand灵巧手自由度数为19个,主动自由度为12个,并引入基于MEMS原理的触觉感知和视触觉感知技术帕西尼DexH5DexH13手指表面配备了自研高精度三维力传感器,精度可达0.01N,确保了精准控制握持力搭载了1140颗专业级ITPU多维触觉传感器,同时还集成了800万高清AI手眼相机,结合先进的零样本位姿估计视觉算法,使其具备了卓越的AI视觉物体位姿估计能力资料来源:机器人大讲堂、各公司官网,华西证券研究所19