> 数据图表如何了解附录 案例分析:因时机器人-RH56BFX/RH56DFX/FTP系列
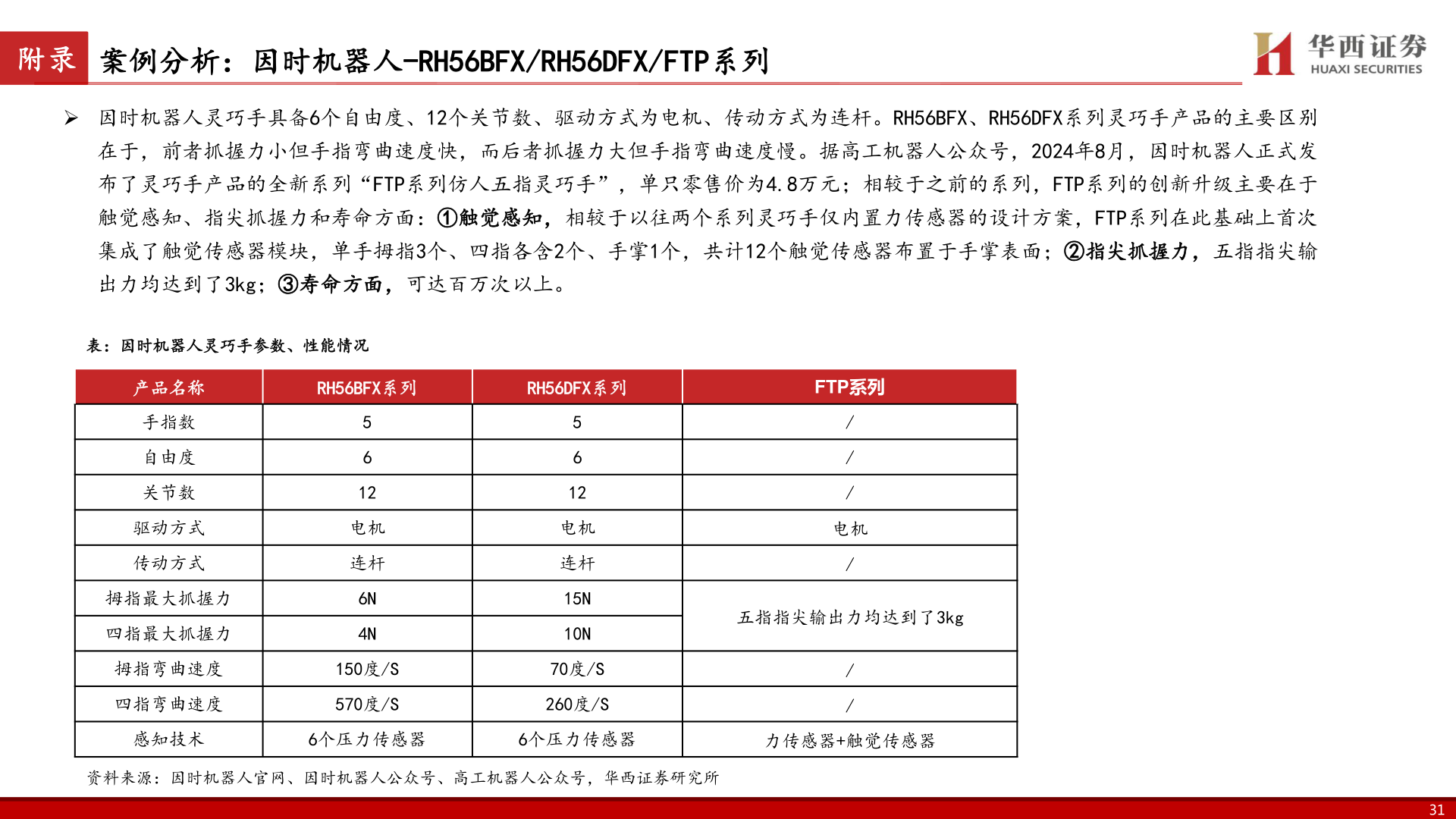
2025-5-2附录 案例分析:因时机器人-RH56BFX/RH56DFX/FTP系列 因时机器人灵巧手具备6个自由度、12个关节数、驱动方式为电机、传动方式为连杆。RH56BFX、RH56DFX系列灵巧手产品的主要区别在于,前者抓握力小但手指弯曲速度快,而后者抓握力大但手指弯曲速度慢。据高工机器人公众号,2024年8月,因时机器人正式发布了灵巧手产品的全新系列“FTP系列仿人五指灵巧手”,单只零售价为4.8万元;相较于之前的系列,FTP系列的创新升级主要在于触觉感知、指尖抓握力和寿命方面:①触觉感知,相较于以往两个系列灵巧手仅内置力传感器的设计方案,FTP系列在此基础上首次集成了触觉传感器模块,单手拇指3个、四指各含2个、手掌1个,共计12个触觉传感器布置于手掌表面;②指尖抓握力,五指指尖输出力均达到了3kg;③寿命方面,可达百万次以上。表:因时机器人灵巧手参数、性能情况产品名称RH56BFX系列RH56DFX系列FTP系列手指数自由度关节数驱动方式传动方式拇指最大抓握力四指最大抓握力拇指弯曲速度四指弯曲速度5612电机连杆6N4N150度/S570度/S5612电机连杆15N10N70度/S260度/S///电机/五指指尖输出力均达到了3kg//感知技术6个压力传感器6个压力传感器力传感器+触觉传感器资料来源:因时机器人官网、因时机器人公众号、高工机器人公众号,华西证券研究所31