> 数据图表谁能回答附录
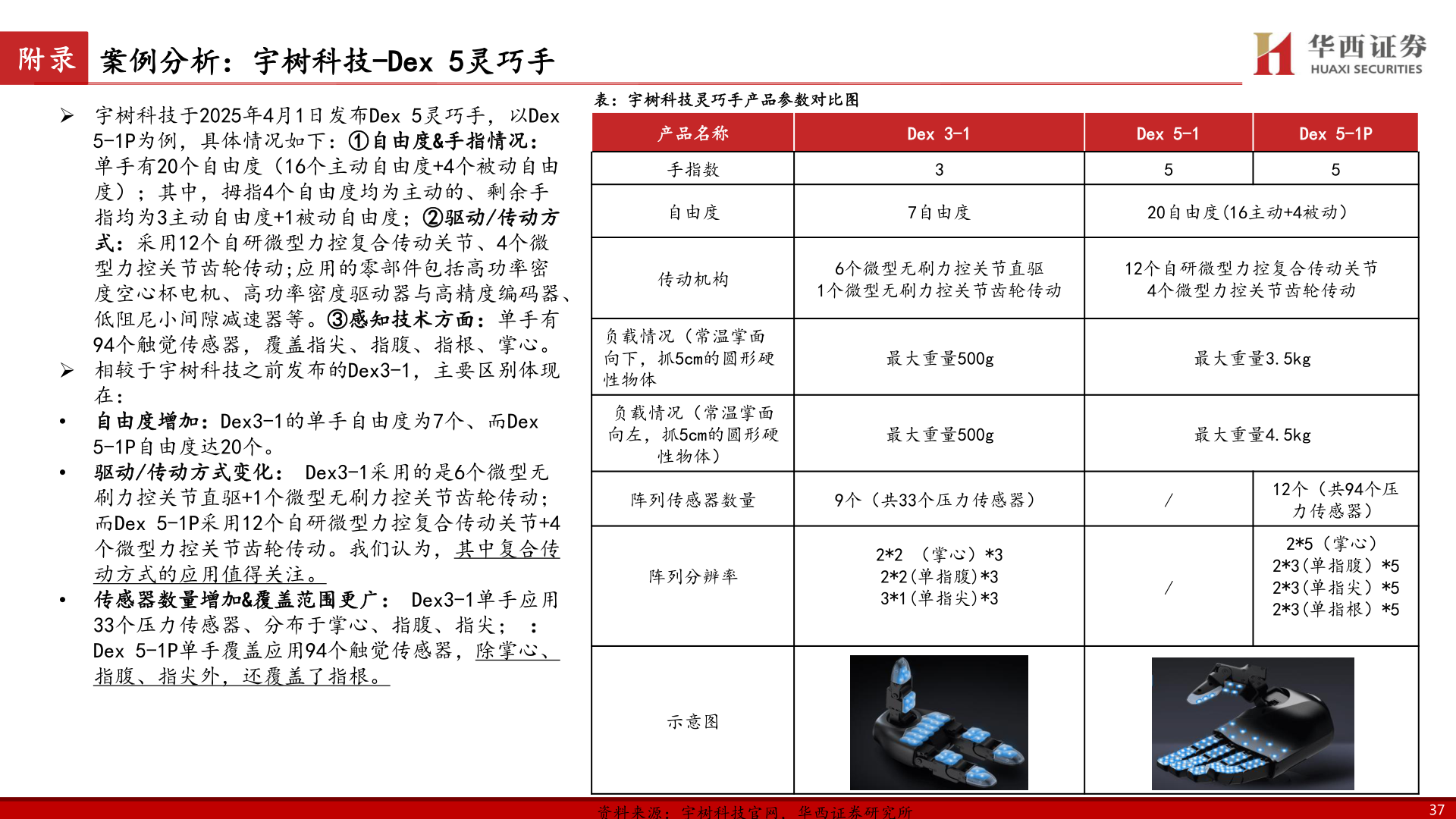
2025-5-2附录案例分析:宇树科技-Dex 5灵巧手 宇树科技于2025年4月1日发布Dex 5灵巧手,以Dex5-1P为例,具体情况如下:①自由度&手指情况:单手有20个自由度(16个主动自由度+4个被动自由度);其中,拇指4个自由度均为主动的、剩余手指均为3主动自由度+1被动自由度;②驱动/传动方式:采用12个自研微型力控复合传动关节、4个微型力控关节齿轮传动;应用的零部件包括高功率密度空心杯电机、高功率密度驱动器与高精度编码器、低阻尼小间隙减速器等。③感知技术方面:单手有94个触觉传感器,覆盖指尖、指腹、指根、掌心。 相较于宇树科技之前发布的Dex3-1,主要区别体现在:• 自由度增加:Dex3-1的单手自由度为7个、而Dex5-1P自由度达20个。• 驱动/传动方式变化: Dex3-1采用的是6个微型无刷力控关节直驱+1个微型无刷力控关节齿轮传动;而Dex 5-1P采用12个自研微型力控复合传动关节+4个微型力控关节齿轮传动。我们认为,其中复合传动方式的应用值得关注。• 传感器数量增加&覆盖范围更广: Dex3-1单手应用33个压力传感器、分布于掌心、指腹、指尖; :Dex 5-1P单手覆盖应用94个触觉传感器,除掌心、指腹、指尖外,还覆盖了指根。表:宇树科技灵巧手产品参数对比图产品名称手指数自由度传动机构负载情况(常温掌面向下,抓5cm的圆形硬性物体负载情况(常温掌面向左,抓5cm的圆形硬性物体)Dex 3-137自由度Dex 5-1Dex 5-1P5520自由度(16主动+4被动)6个微型无刷力控关节直驱12个自研微型力控复合传动关节1个微型无刷力控关节齿轮传动4个微型力控关节齿轮传动最大重量500g最大重量3.5kg最大重量500g最大重量4.5kg阵列传感器数量9个(共33个压力传感器)2*2 (掌心)*32*2(单指腹)*33*1(单指尖)*3阵列分辨率示意图//12个(共94个压力传感器)2*5(掌心)2*3(单指腹)*52*3(单指尖)*52*3(单指根)*5资料来源:宇树科技官网,华西证券研究所37