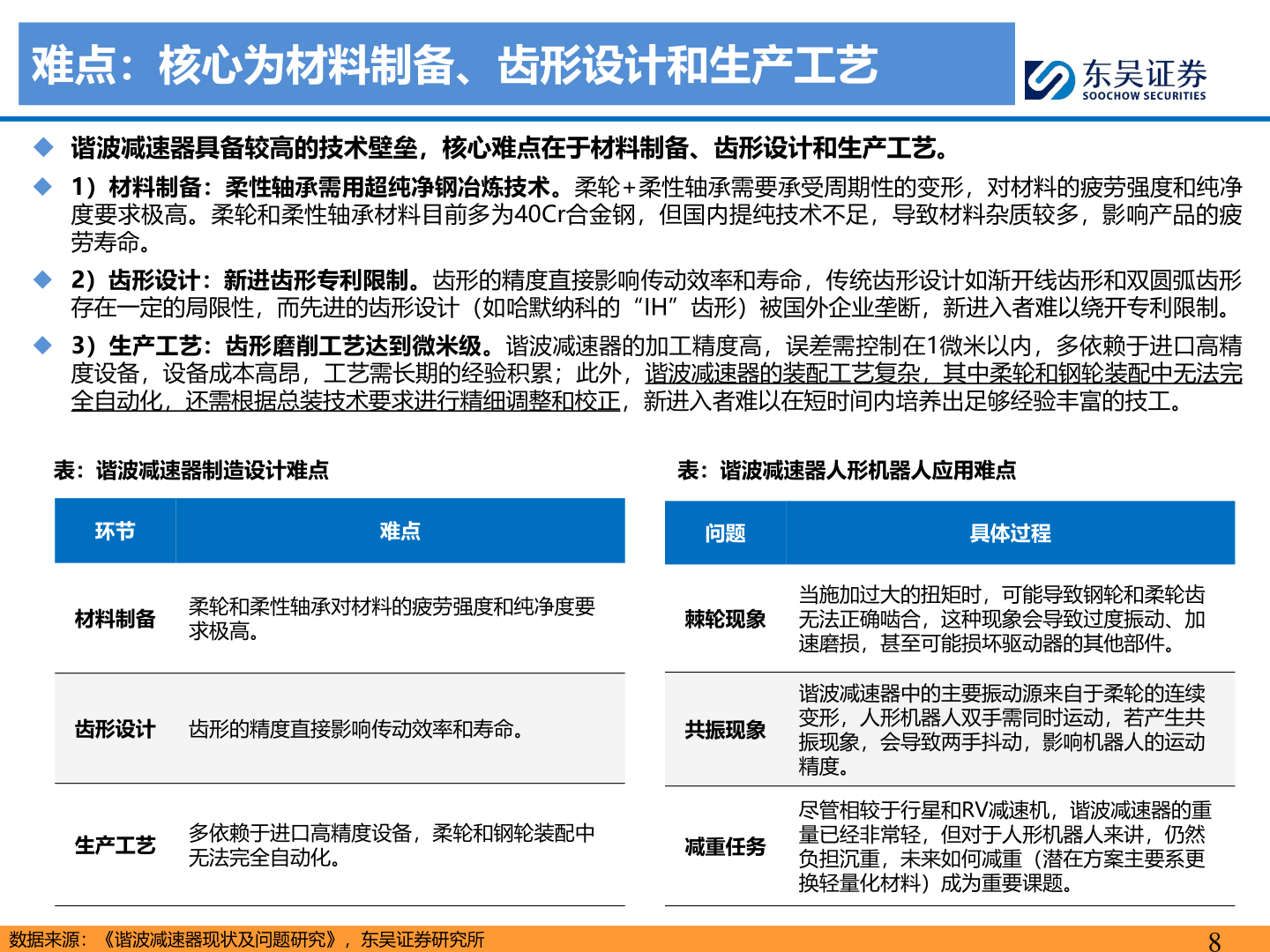
> 数据图表想问下各位网友难点:核心为材料制备、齿形设计和生产工艺2025-5-5难点:核心为材料制备、齿形设计和生产工艺◆ 谐波减速器具备较高的技术壁垒,核心难点在于材料制备、齿形设计和生产工艺。◆ 1)材料制备:柔性轴承需用超纯净钢冶炼技术。柔轮+柔性轴承需要承受周期性的变形,对材料的疲劳强度和纯净度要求极高。柔轮和柔性轴承材料目前多为40Cr合金钢,但国内提纯技术不足,导致材料杂质较多,影响产品的疲劳寿命。◆ 2)齿形设计:新进齿形专利限制。齿形的精度直接影响传动效率和寿命,传统齿形设计如渐开线齿形和双圆弧齿形存在一定的局限性,而先进的齿形设计(如哈默纳科的“IH”齿形)被国外企业垄断,新进入者难以绕开专利限制。◆ 3)生产工艺:齿形磨削工艺达到微米级。谐波减速器的加工精度高,误差需控制在1微米以内,多依赖于进口高精度设备,设备成本高昂,工艺需长期的经验积累;此外,谐波减速器的装配工艺复杂,其中柔轮和钢轮装配中无法完全自动化,还需根据总装技术要求进行精细调整和校正,新进入者难以在短时间内培养出足够经验丰富的技工。表:谐波减速器制造设计难点表:谐波减速器人形机器人应用难点环节难点问题具体过程材料制备柔轮和柔性轴承对材料的疲劳强度和纯净度要求极高。棘轮现象齿形设计 齿形的精度直接影响传动效率和寿命。共振现象生产工艺多依赖于进口高精度设备,柔轮和钢轮装配中无法完全自动化。减重任务当施加过大的扭矩时,可能导致钢轮和柔轮齿无法正确啮合,这种现象会导致过度振动、加速磨损,甚至可能损坏驱动器的其他部件。谐波减速器中的主要振动源来自于柔轮的连续变形,人形机器人双手需同时运动,若产生共振现象,会导致两手抖动,影响机器人的运动精度。尽管相较于行星和RV减速机,谐波减速器的重量已经非常轻,但对于人形机器人来讲,仍然负担沉重,未来如何减重(潜在方案主要系更换轻量化材料)成为重要课题。数据来源:《谐波减速器现状及问题研究》,东吴证券研究所8东吴证券综合其他