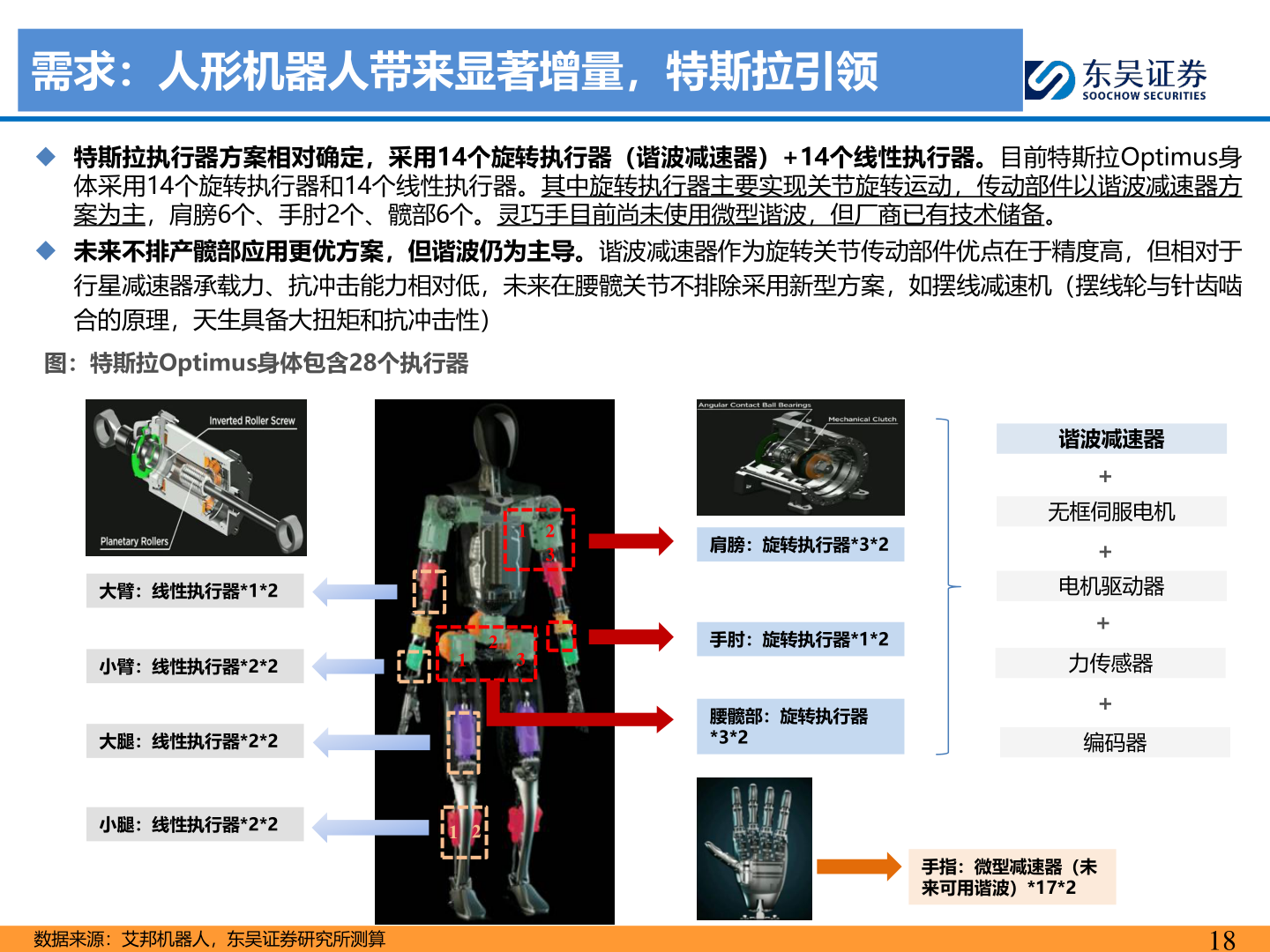
> 数据图表谁知道需求:人形机器人带来显著增量,特斯拉引领2025-5-5需求:人形机器人带来显著增量,特斯拉引领◆ 特斯拉执行器方案相对确定,采用14个旋转执行器(谐波减速器)+14个线性执行器。目前特斯拉Optimus身体采用14个旋转执行器和14个线性执行器。其中旋转执行器主要实现关节旋转运动,传动部件以谐波减速器方案为主,肩膀6个、手肘2个、髋部6个。灵巧手目前尚未使用微型谐波,但厂商已有技术储备。◆ 未来不排产髋部应用更优方案,但谐波仍为主导。谐波减速器作为旋转关节传动部件优点在于精度高,但相对于行星减速器承载力、抗冲击能力相对低,未来在腰髋关节不排除采用新型方案,如摆线减速机(摆线轮与针齿啮合的原理,天生具备大扭矩和抗冲击性)图:特斯拉Optimus身体包含28个执行器大臂:线性执行器*1*2小臂:线性执行器*2*2大腿:线性执行器*2*21 23肩膀:旋转执行器*3*2213手肘:旋转执行器*1*2腰髋部:旋转执行器*3*2谐波减速器+无框伺服电机+电机驱动器+力传感器+编码器小腿:线性执行器*2*21 2数据来源:艾邦机器人,东吴证券研究所测算手指:微型减速器(未来可用谐波)*17*218东吴证券综合其他