> 数据图表一起讨论下机器人数据分为真实数据和仿真数据两类
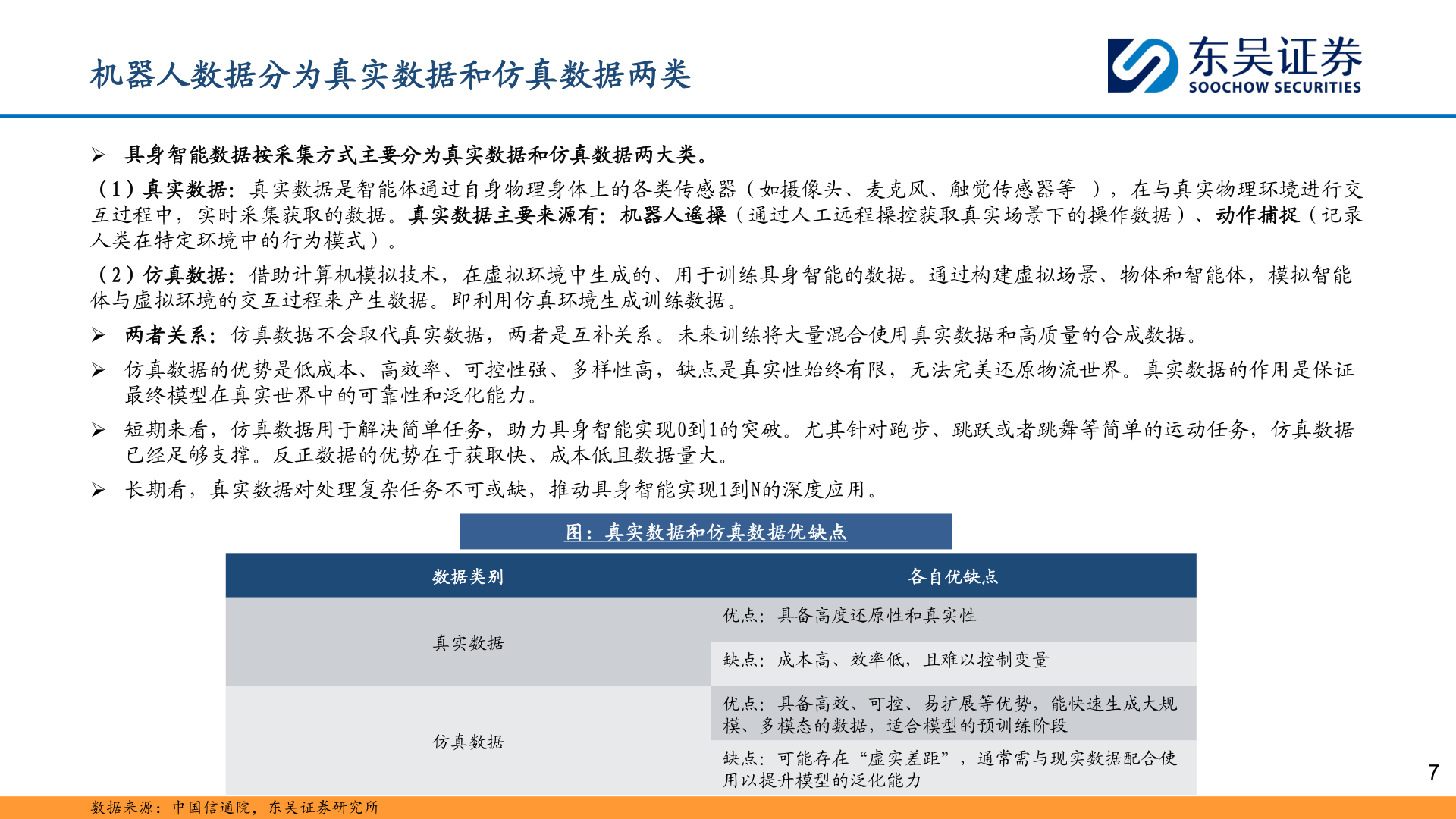
2025-6-3机器人数据分为真实数据和仿真数据两类➢ 具身智能数据按采集方式主要分为真实数据和仿真数据两大类。(1)真实数据:真实数据是智能体通过自身物理身体上的各类传感器(如摄像头、麦克风、触觉传感器等 ),在与真实物理环境进行交互过程中,实时采集获取的数据。真实数据主要来源有:机器人遥操(通过人工远程操控获取真实场景下的操作数据)、动作捕捉(记录人类在特定环境中的行为模式)。(2)仿真数据:借助计算机模拟技术,在虚拟环境中生成的、用于训练具身智能的数据。通过构建虚拟场景、物体和智能体,模拟智能体与虚拟环境的交互过程来产生数据。即利用仿真环境生成训练数据。➢ 两者关系:仿真数据不会取代真实数据,两者是互补关系。未来训练将大量混合使用真实数据和高质量的合成数据。➢ 仿真数据的优势是低成本、高效率、可控性强、多样性高,缺点是真实性始终有限,无法完美还原物流世界。真实数据的作用是保证最终模型在真实世界中的可靠性和泛化能力。➢ 短期来看,仿真数据用于解决简单任务,助力具身智能实现0到1的突破。尤其针对跑步、跳跃或者跳舞等简单的运动任务,仿真数据已经足够支撑。反正数据的优势在于获取快、成本低且数据量大。➢ 长期看,真实数据对处理复杂任务不可或缺,推动具身智能实现1到N的深度应用。图:真实数据和仿真数据优缺点数据类别真实数据仿真数据各自优缺点优点:具备高度还原性和真实性缺点:成本高、效率低,且难以控制变量优点:具备高效、可控、易扩展等优势,能快速生成大规模、多模态的数据,适合模型的预训练阶段缺点:可能存在“虚实差距”,通常需与现实数据配合使用以提升模型的泛化能力7数据来源:中国信通院,东吴证券研究所