> 数据图表想问下各位网友丰富的高质量具身智能数据集
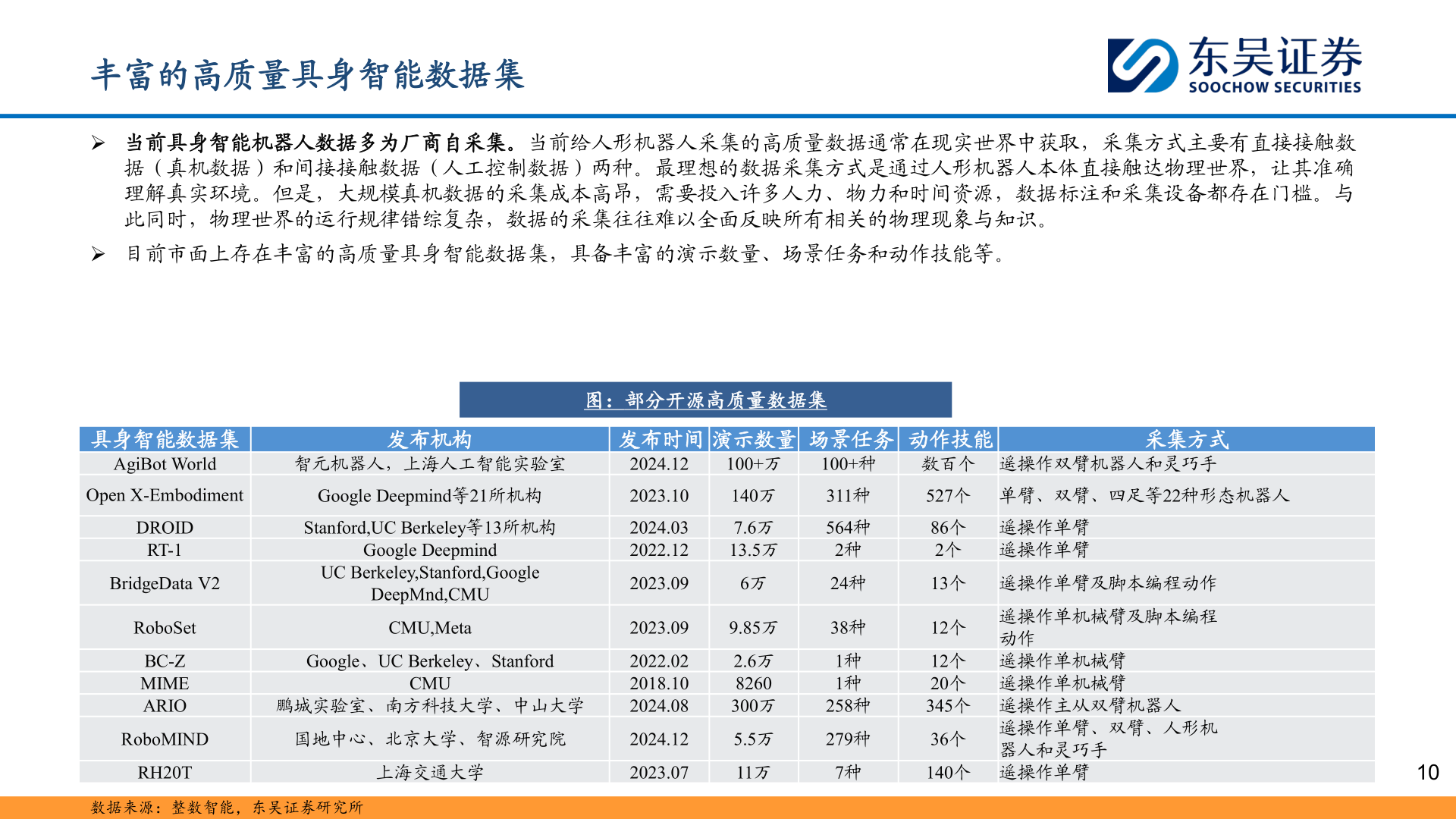
2025-6-3丰富的高质量具身智能数据集➢ 当前具身智能机器人数据多为厂商自采集。当前给人形机器人采集的高质量数据通常在现实世界中获取,采集方式主要有直接接触数据(真机数据)和间接接触数据(人工控制数据)两种。最理想的数据采集方式是通过人形机器人本体直接触达物理世界,让其准确理解真实环境。但是,大规模真机数据的采集成本高昂,需要投入许多人力、物力和时间资源,数据标注和采集设备都存在门槛。与此同时,物理世界的运行规律错综复杂,数据的采集往往难以全面反映所有相关的物理现象与知识。➢ 目前市面上存在丰富的高质量具身智能数据集,具备丰富的演示数量、场景任务和动作技能等。图:部分开源高质量数据集具身智能数据集AgiBot World发布机构智元机器人,上海人工智能实验室Open X-EmbodimentGoogle Deepmind等21所机构DROIDRT-1BridgeData V2RoboSetBC-ZMIMEARIORoboMINDRH20TStanford,UC Berkeley等13所机构Google DeepmindUC Berkeley,Stanford,GoogleDeepMnd,CMUCMU,MetaGoogle、UC Berkeley、StanfordCMU鹏城实验室、南方科技大学、中山大学国地中心、北京大学、智源研究院上海交通大学数据来源:整数智能,东吴证券研究所发布时间 演示数量 场景任务 动作技能2024.12100+万采集方式100+种数百个 遥操作双臂机器人和灵巧手2023.102024.03 2022.12140万7.6万13.5万2023.096万2023.099.85万2022.02 2018.10 2024.082024.122023.072.6万8260 300万5.5万11万311种564种2种24种38种1种1种258种279种7种527个 单臂、双臂、四足等22种形态机器人86个 遥操作单臂2个遥操作单臂13个 遥操作单臂及脚本编程动作12个遥操作单机械臂及脚本编程动作12个 遥操作单机械臂20个 遥操作单机械臂345个 遥操作主从双臂机器人36个遥操作单臂、双臂、人形机器人和灵巧手140个 遥操作单臂10