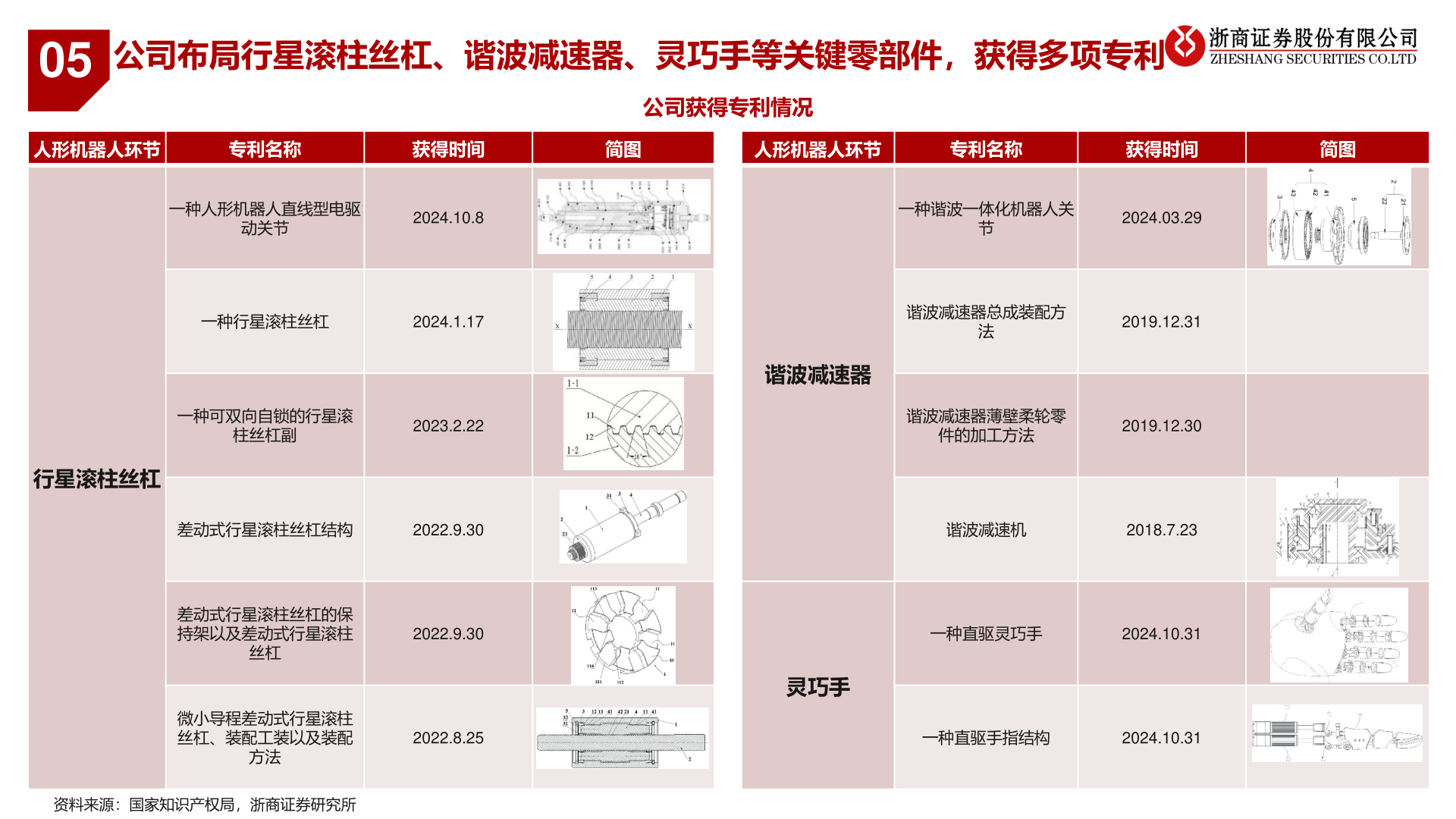
> 数据图表如何才能052025-3-005公司布局行星滚柱丝杠、谐波减速器、灵巧手等关键零部件,获得多项专利公司获得专利情况人形机器人环节专利名称获得时间简图人形机器人环节专利名称获得时间简图一种人形机器人直线型电驱动关节2024.10.8一种谐波一体化机器人关节2024.03.29一种行星滚柱丝杠2024.1.17谐波减速器总成装配方法2019.12.31一种可双向自锁的行星滚柱丝杠副2023.2.22谐波减速器薄壁柔轮零件的加工方法2019.12.30谐波减速器行星滚柱丝杠差动式行星滚柱丝杠结构2022.9.30谐波减速机2018.7.23差动式行星滚柱丝杠的保持架以及差动式行星滚柱丝杠2022.9.30微小导程差动式行星滚柱丝杠、装配工装以及装配方法2022.8.25资料来源:国家知识产权局,浙商证券研究所一种直驱灵巧手2024.10.31灵巧手一种直驱手指结构2024.10.3123浙商证券综合其他