> 数据图表想问下各位网友
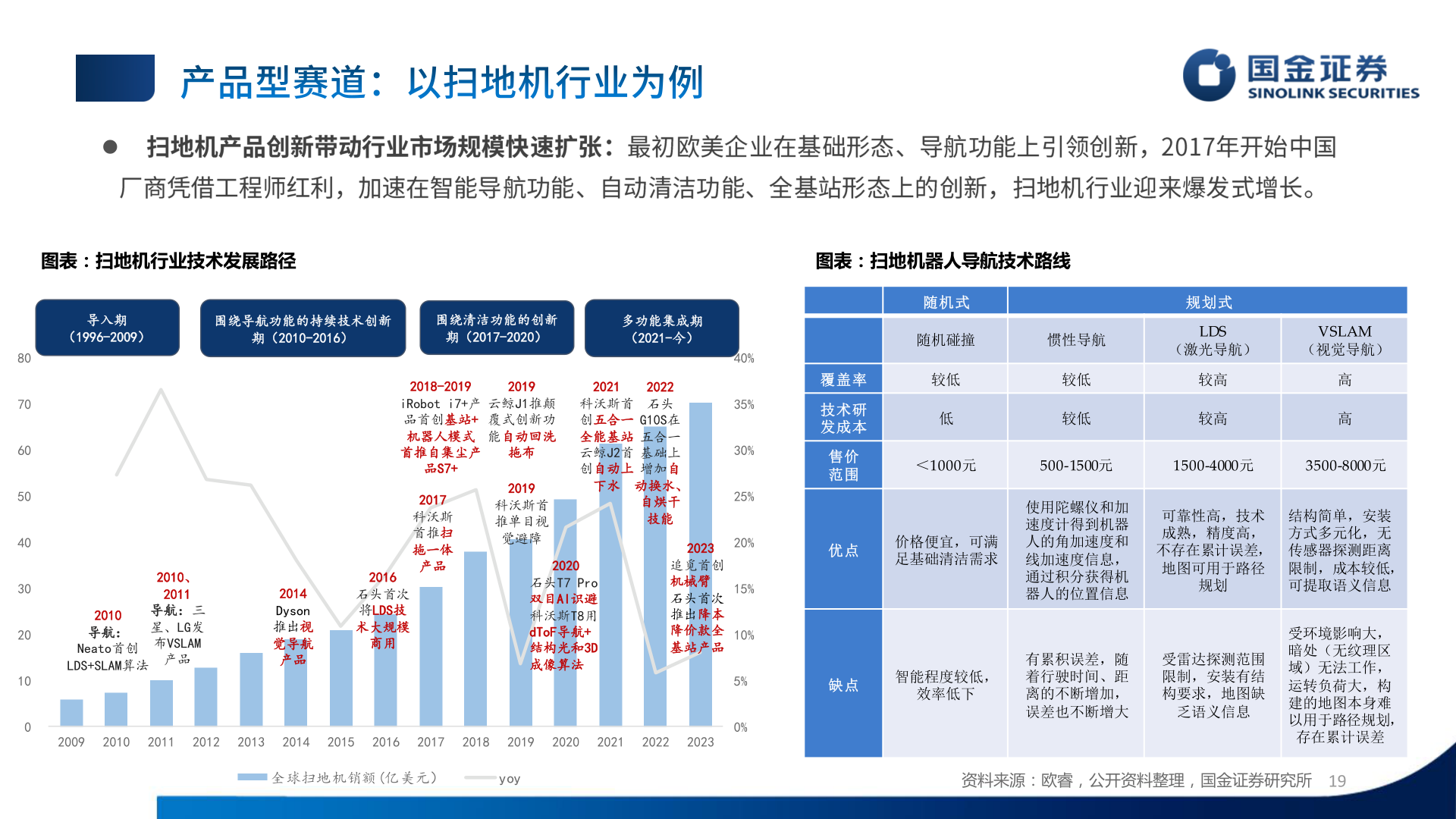
2025-3-3图表:扫地机行业技术发展路径图表:扫地机器人导航技术路线80706050403020100导入期(1996-2009)围绕导航功能的持续技术创新期(2010-2016)围绕清洁功能的创新期(2017-2020)多功能集成期(2021-今)2018-20192019iRobot i7+产品首创基站+机器人模式首推自集尘产云鲸J1推颠覆式创新功能自动回洗拖布2021科沃斯首创五合一全能基站云鲸J2首创自动上下水2022石头G10S在五合一基础上增加自动换水、自烘干技能品S7+2017科沃斯首推扫拖一体产品2010、2011导航:三星、LG发布VSLAM产品2010导航:Neato首创LDS+SLAM算法2016石头首次将LDS技术大规模商用2014Dyson推出视觉导航产品2019科沃斯首推单目视觉避障2020石头T7 Pro双目AI识避科沃斯T8用dToF导航+结构光和3D成像算法随机式随机碰撞惯性导航较低低较低较低规划式LDS(激光导航)较高较高VSLAM(视觉导航)高高<1000元500-1500元1500-4000元3500-8000元覆盖率技术研发成本售价范围优点价格便宜,可满足基础清洁需求使用陀螺仪和加速度计得到机器人的角加速度和线加速度信息,通过积分获得机器人的位置信息可靠性高,技术成熟,精度高,不存在累计误差,地图可用于路径规划结构简单,安装方式多元化,无传感器探测距离限制,成本较低,可提取语义信息缺点智能程度较低,效率低下有累积误差,随着行驶时间、距离的不断增加,误差也不断增大受雷达探测范围限制,安装有结构要求,地图缺乏语义信息受环境影响大,暗处(无纹理区域)无法工作,运转负荷大,构建的地图本身难以用于路径规划,存在累计误差40%35%30%25%20%15%10%5%0%2023追觅首创机械臂石头首次推出降本降价款全基站产品200920102011201220132014201520162017201820192020202120222023全球扫地机销额(亿美元)yoy资料来源:欧睿,公开资料整理,国金证券研究所19