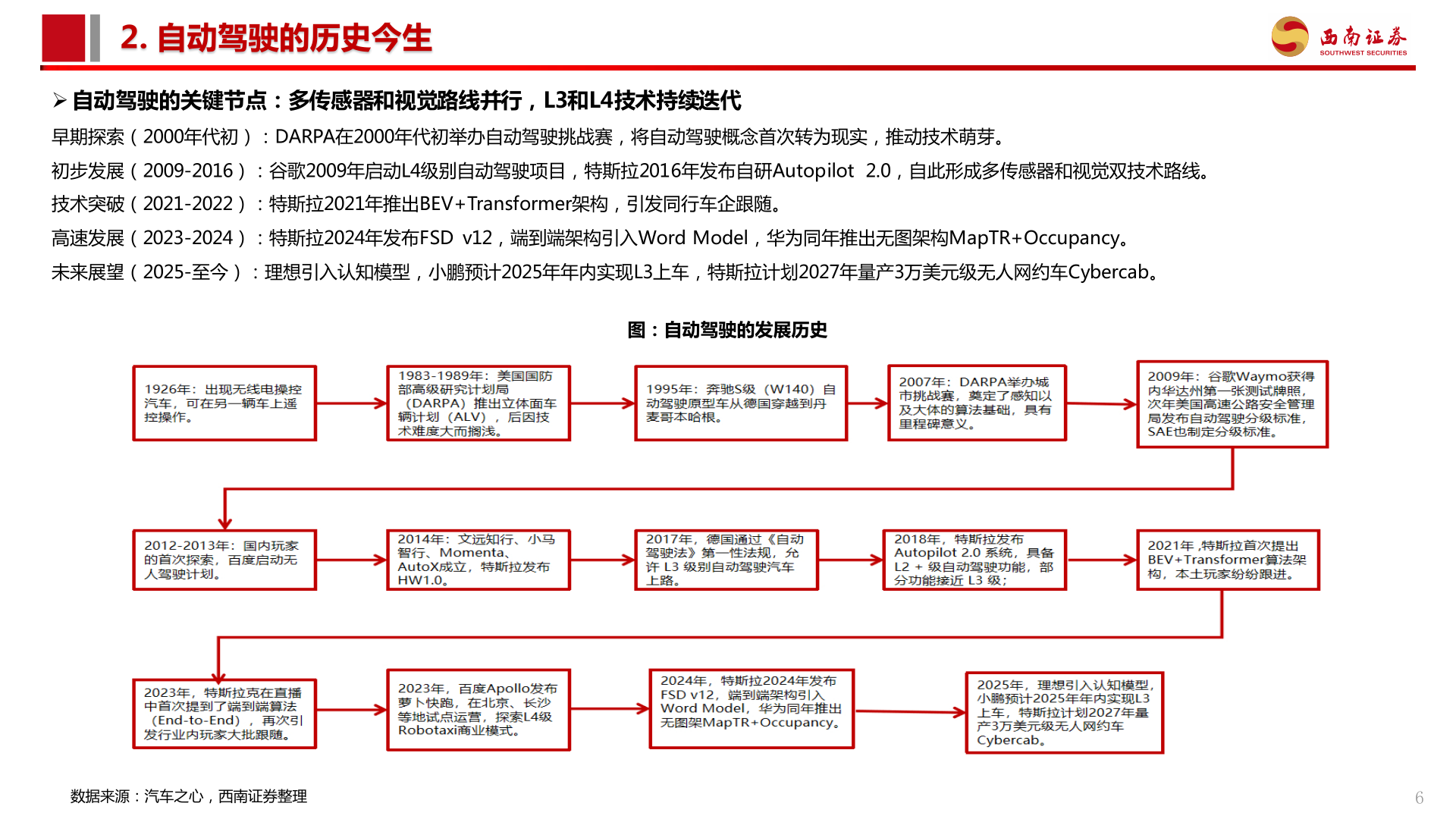
> 数据图表如何看待2. 自动驾驶的历史今生2025-6-32. 自动驾驶的历史今生 自动驾驶的关键节点:多传感器和视觉路线并行,L3和L4技术持续迭代早期探索(2000年代初):DARPA在2000年代初举办自动驾驶挑战赛,将自动驾驶概念首次转为现实,推动技术萌芽。初步发展(2009-2016):谷歌2009年启动L4级别自动驾驶项目,特斯拉2016年发布自研Autopilot 2.0,自此形成多传感器和视觉双技术路线。技术突破(2021-2022):特斯拉2021年推出BEV+Transformer架构,引发同行车企跟随。高速发展(2023-2024):特斯拉2024年发布FSD v12,端到端架构引入Word Model,华为同年推出无图架构MapTR+Occupancy。未来展望(2025-至今):理想引入认知模型,小鹏预计2025年年内实现L3上车,特斯拉计划2027年量产3万美元级无人网约车Cybercab。图:自动驾驶的发展历史数据来源:汽车之心,西南证券整理6西南证券综合其他