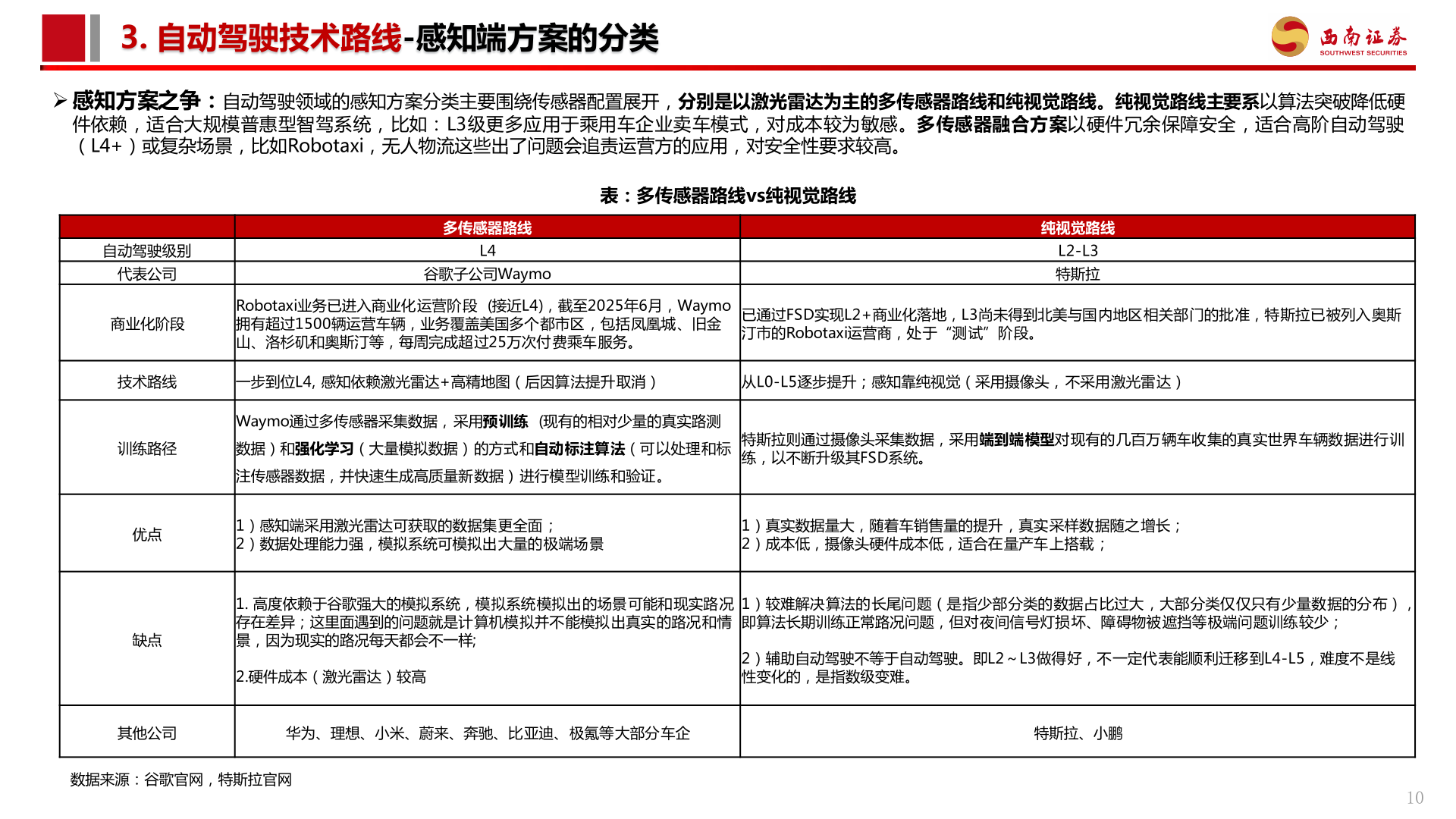
> 数据图表谁知道3. 自动驾驶技术路线-感知端方案的分类2025-6-33. 自动驾驶技术路线-感知端方案的分类 感知方案之争:自动驾驶领域的感知方案分类主要围绕传感器配置展开,分别是以激光雷达为主的多传感器路线和纯视觉路线。纯视觉路线主要系以算法突破降低硬件依赖,适合大规模普惠型智驾系统,比如:L3级更多应用于乘用车企业卖车模式,对成本较为敏感。多传感器融合方案以硬件冗余保障安全,适合高阶自动驾驶(L4+)或复杂场景,比如Robotaxi,无人物流这些出了问题会追责运营方的应用,对安全性要求较高。自动驾驶级别代表公司商业化阶段表:多传感器路线vs纯视觉路线多传感器路线L4谷歌子公司Waymo纯视觉路线L2-L3 特斯拉Robotaxi业务已进入商业化运营阶段 (接近L4),截至2025年6月,Waymo拥有超过1500辆运营车辆,业务覆盖美国多个都市区,包括凤凰城、旧金山、洛杉矶和奥斯汀等,每周完成超过25万次付费乘车服务。已通过FSD实现L2+商业化落地,L3尚未得到北美与国内地区相关部门的批准,特斯拉已被列入奥斯汀市的Robotaxi运营商,处于“测试”阶段。技术路线一步到位L4, 感知依赖激光雷达+高精地图(后因算法提升取消)从L0-L5逐步提升;感知靠纯视觉(采用摄像头,不采用激光雷达)Waymo通过多传感器采集数据,采用预训练 (现有的相对少量的真实路测训练路径数据)和强化学习(大量模拟数据)的方式和自动标注算法(可以处理和标注传感器数据,并快速生成高质量新数据)进行模型训练和验证。特斯拉则通过摄像头采集数据,采用端到端模型对现有的几百万辆车收集的真实世界车辆数据进行训练,以不断升级其FSD系统。优点1)感知端采用激光雷达可获取的数据集更全面; 2)数据处理能力强,模拟系统可模拟出大量的极端场景1)真实数据量大,随着车销售量的提升,真实采样数据随之增长; 2)成本低,摄像头硬件成本低,适合在量产车上搭载;缺点1. 高度依赖于谷歌强大的模拟系统,模拟系统模拟出的场景可能和现实路况存在差异;这里面遇到的问题就是计算机模拟并不能模拟出真实的路况和情景,因为现实的路况每天都会不一样; 2.硬件成本(激光雷达)较高1)较难解决算法的长尾问题(是指少部分类的数据占比过大,大部分类仅仅只有少量数据的分布),即算法长期训练正常路况问题,但对夜间信号灯损坏、障碍物被遮挡等极端问题训练较少; 2)辅助自动驾驶不等于自动驾驶。即L2~L3做得好,不一定代表能顺利迁移到L4-L5,难度不是线性变化的,是指数级变难。其他公司华为、理想、小米、蔚来、奔驰、比亚迪、极氪等大部分车企特斯拉、小鹏数据来源:谷歌官网,特斯拉官网10西南证券综合其他