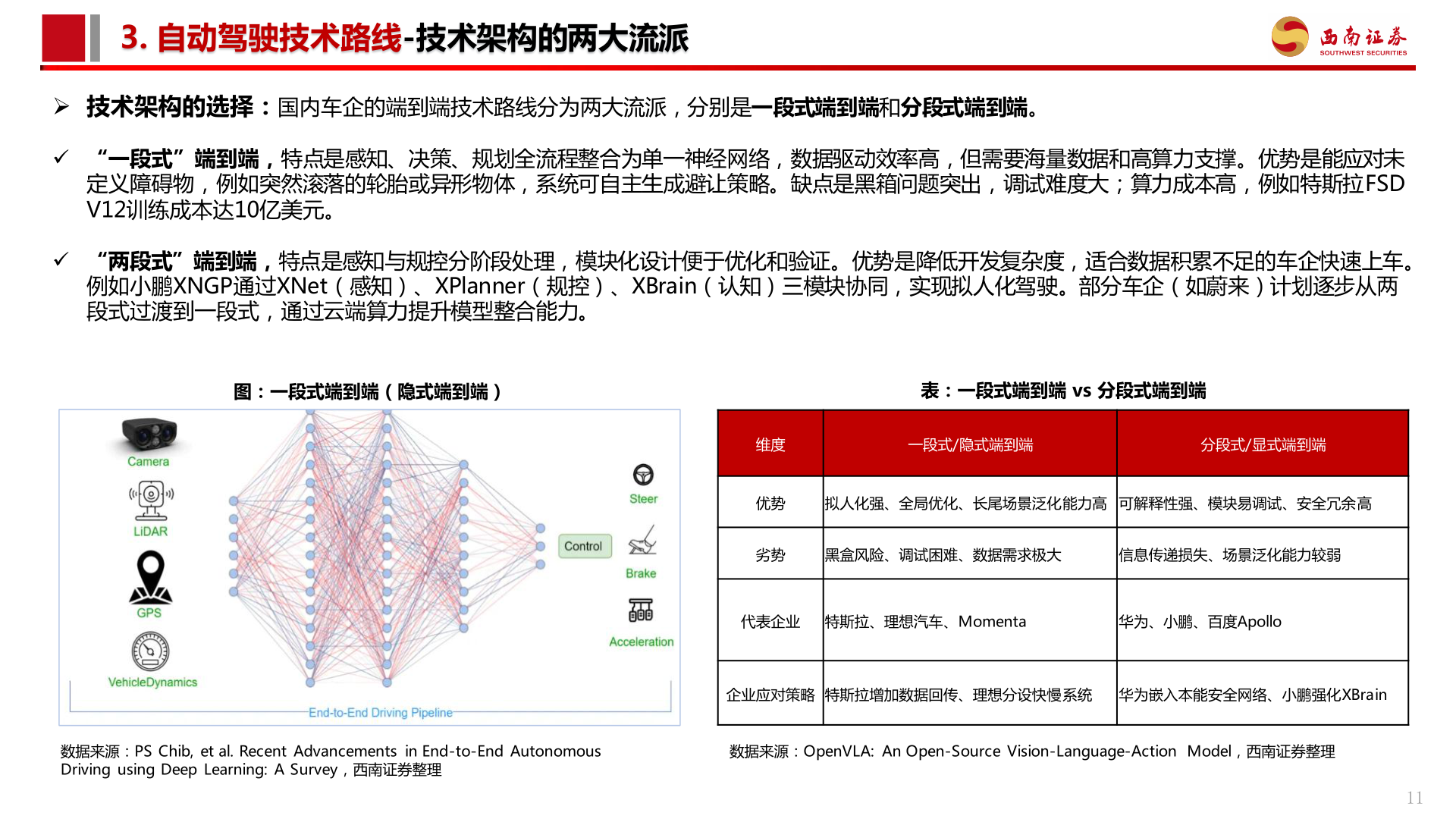
3. 自动驾驶技术路线-技术架构的两大流派 技术架构的选择:国内车企的端到端技术路线分为两大流派,分别是一段式端到端和分段式端到端。 “一段式”端到端,特点是感知、决策、规划全流程整合为单一神经网络,数据驱动效率高,但需要海量数据和高算力支撑。优势是能应对未定义障碍物,例如突然滚落的轮胎或异形物体,系统可自主生成避让策略。缺点是黑箱问题突出,调试难度大;算力成本高,例如特斯拉FSD V12训练成本达10亿美元。 “两段式”端到端,特点是感知与规控分阶段处理,模块化设计便于优化和验证。优势是降低开发复杂度,适合数据积累不足的车企快速上车。例如小鹏XNGP通过XNet(感知)、XPlanner(规控)、XBrain(认知)三模块协同,实现拟人化驾驶。部分车企(如蔚来)计划逐步从两段式过渡到一段式,通过云端算力提升模型整合能力。图:一段式端到端(隐式端到端)表:一段式端到端 vs 分段式端到端维度优势劣势一段式/隐式端到端分段式/显式端到端拟人化强、全局优化、长尾场景泛化能力高 可解释性强、模块易调试、安全冗余高黑盒风险、调试困难、数据需求极大信息传递损失、场景泛化能力较弱代表企业 特斯拉、理想汽车、Momenta华为、小鹏、百度Apollo企业应对策略 特斯拉增加数据回传、理想分设快慢系统 华为嵌入本能安全网络、小鹏强化XBrain数据来源:PS Chib, et al. Recent Advancements in End-to-End Autonomous Driving using Deep Learning: A Survey,西南证券整理数据来源:OpenVLA: An Open-Source Vision-Language-Action Model,西南证券整理11