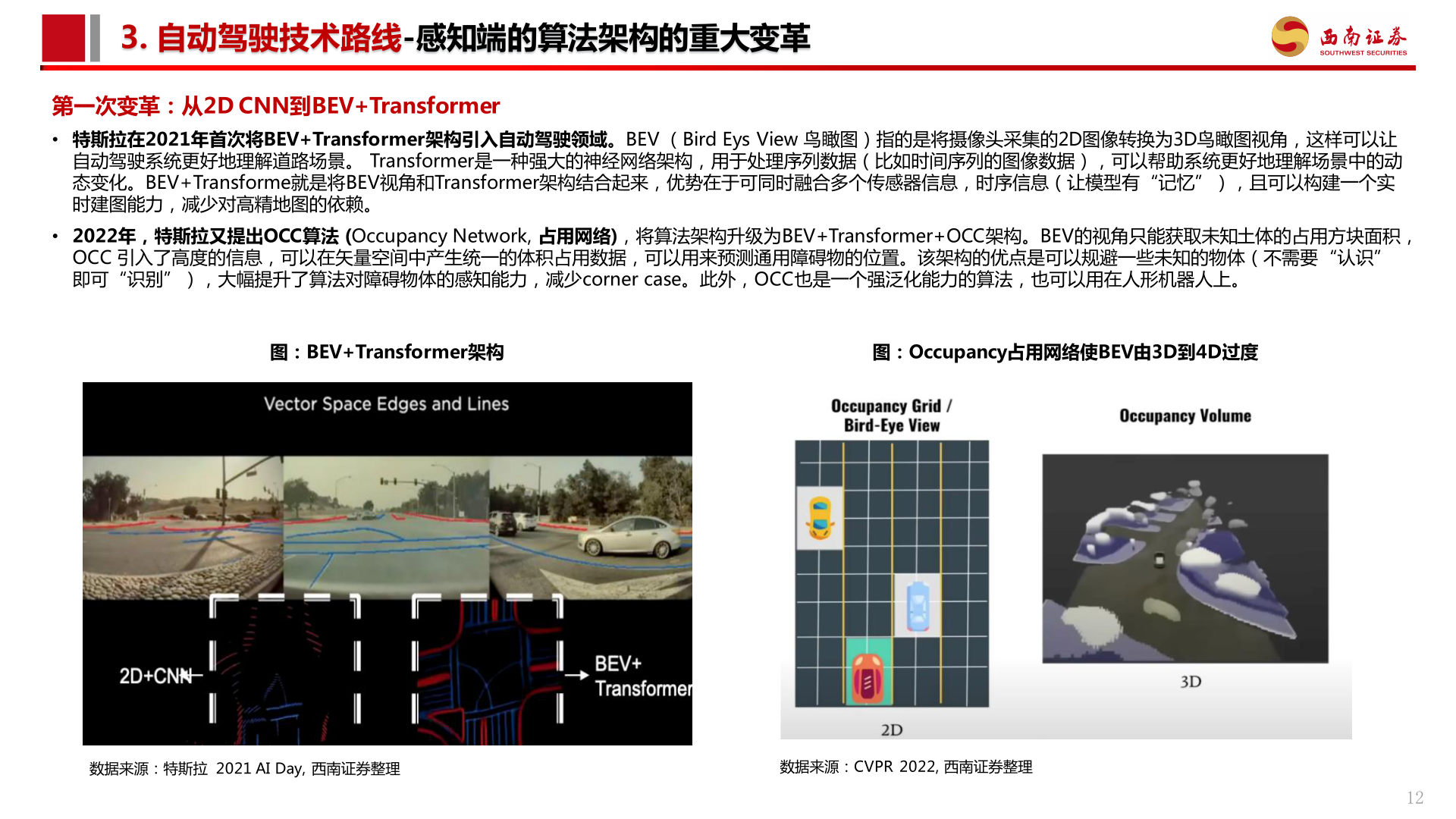
> 数据图表想问下各位网友3. 自动驾驶技术路线-感知端的算法架构的重大变革2025-6-33. 自动驾驶技术路线-感知端的算法架构的重大变革第一次变革:从2D CNN到BEV+Transformer• 特斯拉在2021年首次将BEV+Transformer架构引入自动驾驶领域。BEV (Bird Eys View 鸟瞰图)指的是将摄像头采集的2D图像转换为3D鸟瞰图视角,这样可以让自动驾驶系统更好地理解道路场景。 Transformer是一种强大的神经网络架构,用于处理序列数据(比如时间序列的图像数据),可以帮助系统更好地理解场景中的动态变化。BEV+Transforme就是将BEV视角和Transformer架构结合起来,优势在于可同时融合多个传感器信息,时序信息(让模型有“记忆”),且可以构建一个实时建图能力,减少对高精地图的依赖。• 2022年,特斯拉又提出OCC算法 (Occupancy Network, 占用网络),将算法架构升级为BEV+Transformer+OCC架构。BEV的视角只能获取未知土体的占用方块面积,OCC 引入了高度的信息,可以在矢量空间中产生统一的体积占用数据,可以用来预测通用障碍物的位置。该架构的优点是可以规避一些未知的物体(不需要“认识”即可“识别”),大幅提升了算法对障碍物体的感知能力,减少corner case。此外,OCC也是一个强泛化能力的算法,也可以用在人形机器人上。图:BEV+Transformer架构图:Occupancy占用网络使BEV由3D到4D过度数据来源:特斯拉 2021 AI Day, 西南证券整理数据来源:CVPR 2022, 西南证券整理12西南证券综合其他