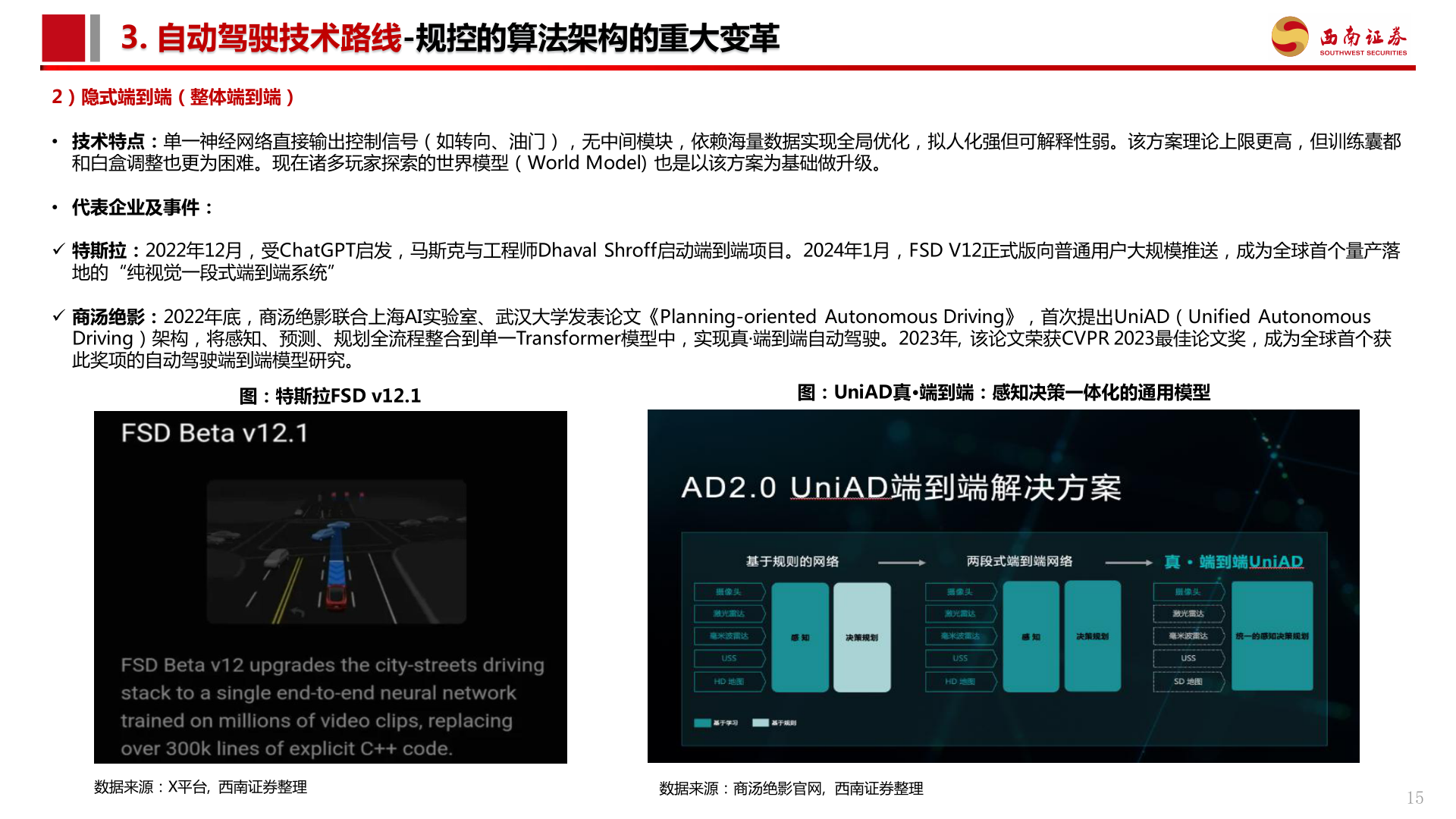
> 数据图表咨询下各位3. 自动驾驶技术路线-规控的算法架构的重大变革2025-6-33. 自动驾驶技术路线-规控的算法架构的重大变革2)隐式端到端(整体端到端) • 技术特点:单一神经网络直接输出控制信号(如转向、油门),无中间模块,依赖海量数据实现全局优化,拟人化强但可解释性弱。该方案理论上限更高,但训练囊都和白盒调整也更为困难。现在诸多玩家探索的世界模型(World Model) 也是以该方案为基础做升级。 • 代表企业及事件: 特斯拉:2022年12月,受ChatGPT启发,马斯克与工程师Dhaval Shroff启动端到端项目。2024年1月,FSD V12正式版向普通用户大规模推送,成为全球首个量产落地的“纯视觉一段式端到端系统” 商汤绝影:2022年底,商汤绝影联合上海AI实验室、武汉大学发表论文《Planning-oriented Autonomous Driving》,首次提出UniAD(Unified AutonomousDriving)架构,将感知、预测、规划全流程整合到单一Transformer模型中,实现真·端到端自动驾驶。2023年, 该论文荣获CVPR 2023最佳论文奖,成为全球首个获此奖项的自动驾驶端到端模型研究。图:UniAD真·端到端:感知决策一体化的通用模型图:特斯拉FSD v12.1数据来源:X平台, 西南证券整理数据来源:商汤绝影官网, 西南证券整理15西南证券综合其他