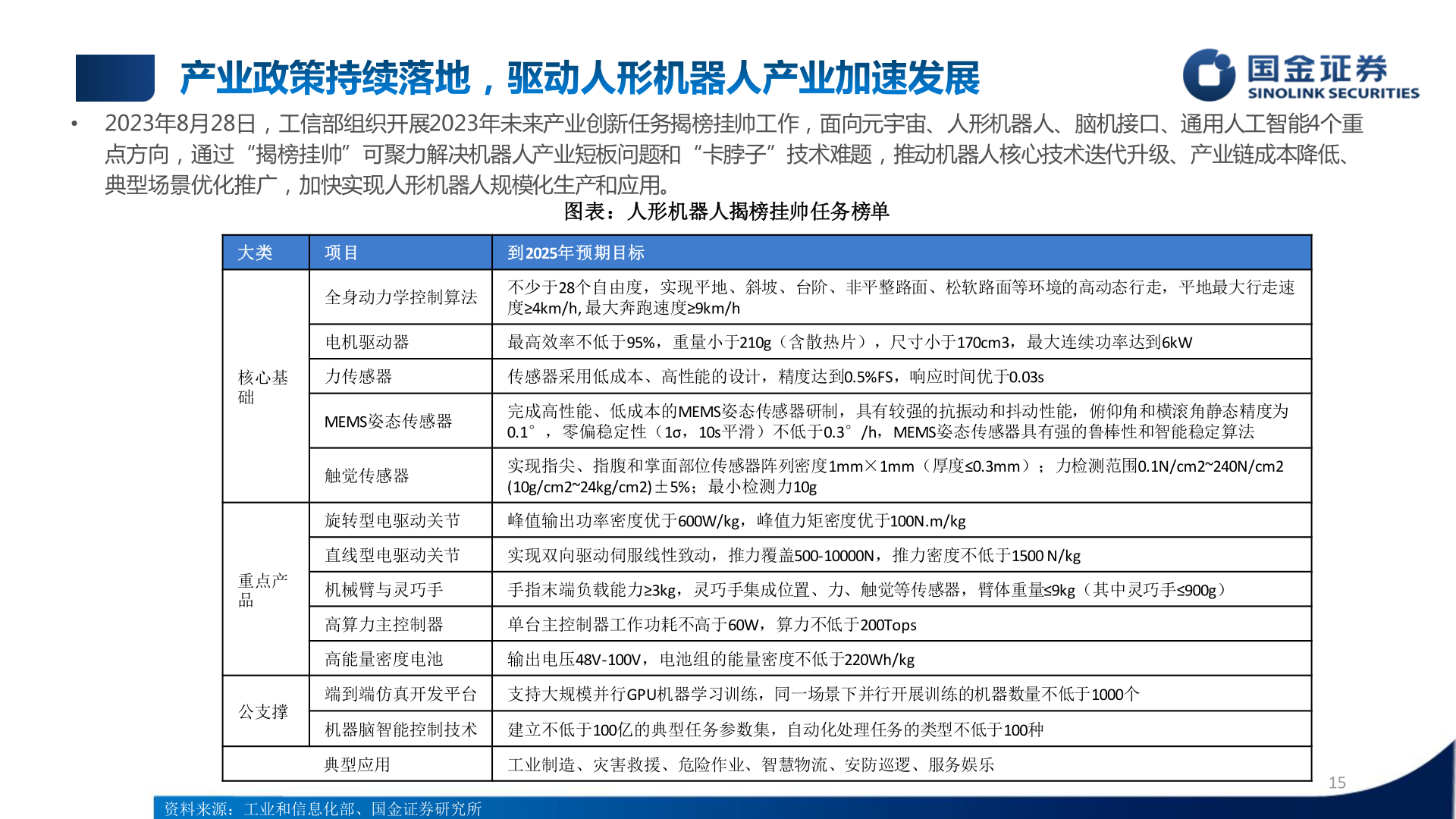
> 数据图表如何了解•2025-4-1•2023年8月28日,工信部组织开展2023年未来产业创新任务揭榜挂帅工作,面向元宇宙、人形机器人、脑机接口、通用人工智能4个重点方向,通过“揭榜挂帅”可聚力解决机器人产业短板问题和“卡脖子”技术难题,推动机器人核心技术迭代升级、产业链成本降低、典型场景优化推广,加快实现人形机器人规模化生产和应用。图表:人形机器人揭榜挂帅任务榜单大类项目到2025年预期目标全身动力学控制算法不少于28个自由度,实现平地、斜坡、台阶、非平整路面、松软路面等环境的高动态行走,平地最大行走速度≥4km/h, 最大奔跑速度≥9km/h电机驱动器力传感器最高效率不低于95%,重量小于210g(含散热片),尺寸小于170cm3,最大连续功率达到6kW传感器采用低成本、高性能的设计,精度达到0.5%FS,响应时间优于0.03sMEMS姿态传感器完成高性能、低成本的MEMS姿态传感器研制,具有较强的抗振动和抖动性能,俯仰角和横滚角静态精度为0.1°,零偏稳定性(1σ,10s平滑)不低于0.3°/h,MEMS姿态传感器具有强的鲁棒性和智能稳定算法触觉传感器实现指尖、指腹和掌面部位传感器阵列密度1mm×1mm(厚度≤0.3mm);力检测范围0.1N/cm2~240N/cm2 (10g/cm2~24kg/cm2)±5%;最小检测力10g旋转型电驱动关节峰值输出功率密度优于600W/kg,峰值力矩密度优于100N.m/kg直线型电驱动关节实现双向驱动伺服线性致动,推力覆盖500-10000N,推力密度不低于1500 N/kg机械臂与灵巧手手指末端负载能力≥3kg,灵巧手集成位置、力、触觉等传感器,臂体重量≤9kg(其中灵巧手≤900g)高算力主控制器单台主控制器工作功耗不高于60W,算力不低于200Tops高能量密度电池输出电压48V-100V,电池组的能量密度不低于220Wh/kg端到端仿真开发平台 支持大规模并行GPU机器学习训练,同一场景下并行开展训练的机器数量不低于1000个机器脑智能控制技术 建立不低于100亿的典型任务参数集,自动化处理任务的类型不低于100种典型应用工业制造、灾害救援、危险作业、智慧物流、安防巡逻、服务娱乐核心基础重点产品公支撑资料来源:工业和信息化部、国金证券研究所15国金证券综合其他