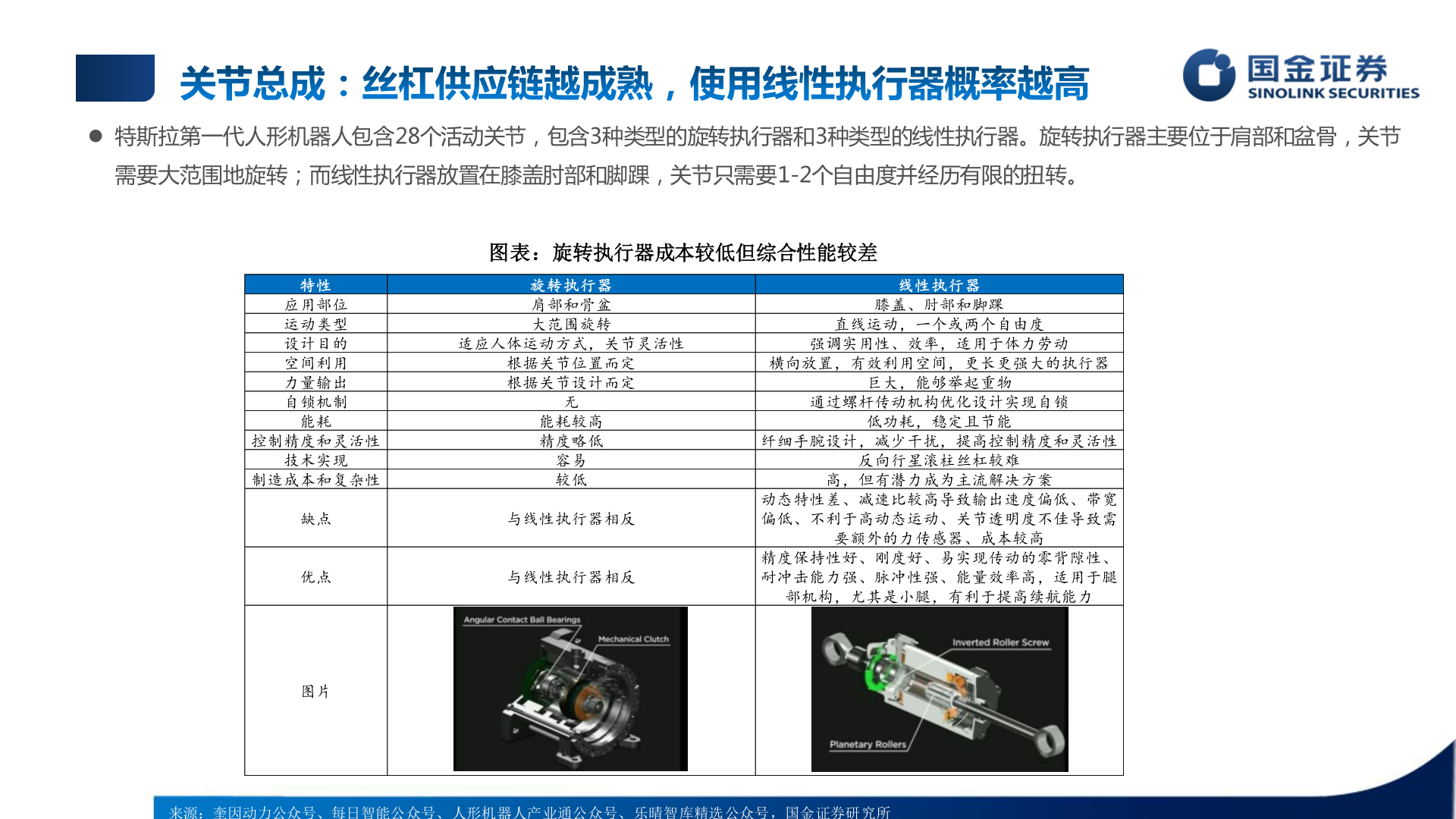
> 数据图表一起讨论下 特斯拉第一代人形机器人包含28个活动关节,包含3种类型的旋转执行器和3种类型的线性执行器。旋转执行器主要位于肩部和盆骨,关节2025-4-1 特斯拉第一代人形机器人包含28个活动关节,包含3种类型的旋转执行器和3种类型的线性执行器。旋转执行器主要位于肩部和盆骨,关节需要大范围地旋转;而线性执行器放置在膝盖肘部和脚踝,关节只需要1-2个自由度并经历有限的扭转。图表:旋转执行器成本较低但综合性能较差来源:奎因动力公众号、每日智能公众号、人形机器人产业通公众号、乐晴智库精选公众号,国金证券研究所旋转执行器肩部和骨盆大范围旋转适应人体运动方式,关节灵活性根据关节位置而定根据关节设计而定无能耗较高精度略低容易较低与线性执行器相反与线性执行器相反线性执行器膝盖、肘部和脚踝直线运动,一个或两个自由度强调实用性、效率,适用于体力劳动横向放置,有效利用空间,更长更强大的执行器巨大,能够举起重物通过螺杆传动机构优化设计实现自锁低功耗,稳定且节能纤细手腕设计,减少干扰,提高控制精度和灵活性反向行星滚柱丝杠较难高,但有潜力成为主流解决方案动态特性差、减速比较高导致输出速度偏低、带宽偏低、不利于高动态运动、关节透明度不佳导致需要额外的力传感器、成本较高精度保持性好、刚度好、易实现传动的零背隙性、耐冲击能力强、脉冲性强、能量效率高,适用于腿部机构,尤其是小腿,有利于提高续航能力特性应用部位运动类型设计目的空间利用力量输出自锁机制能耗控制精度和灵活性技术实现制造成本和复杂性缺点优点图片国金证券综合其他