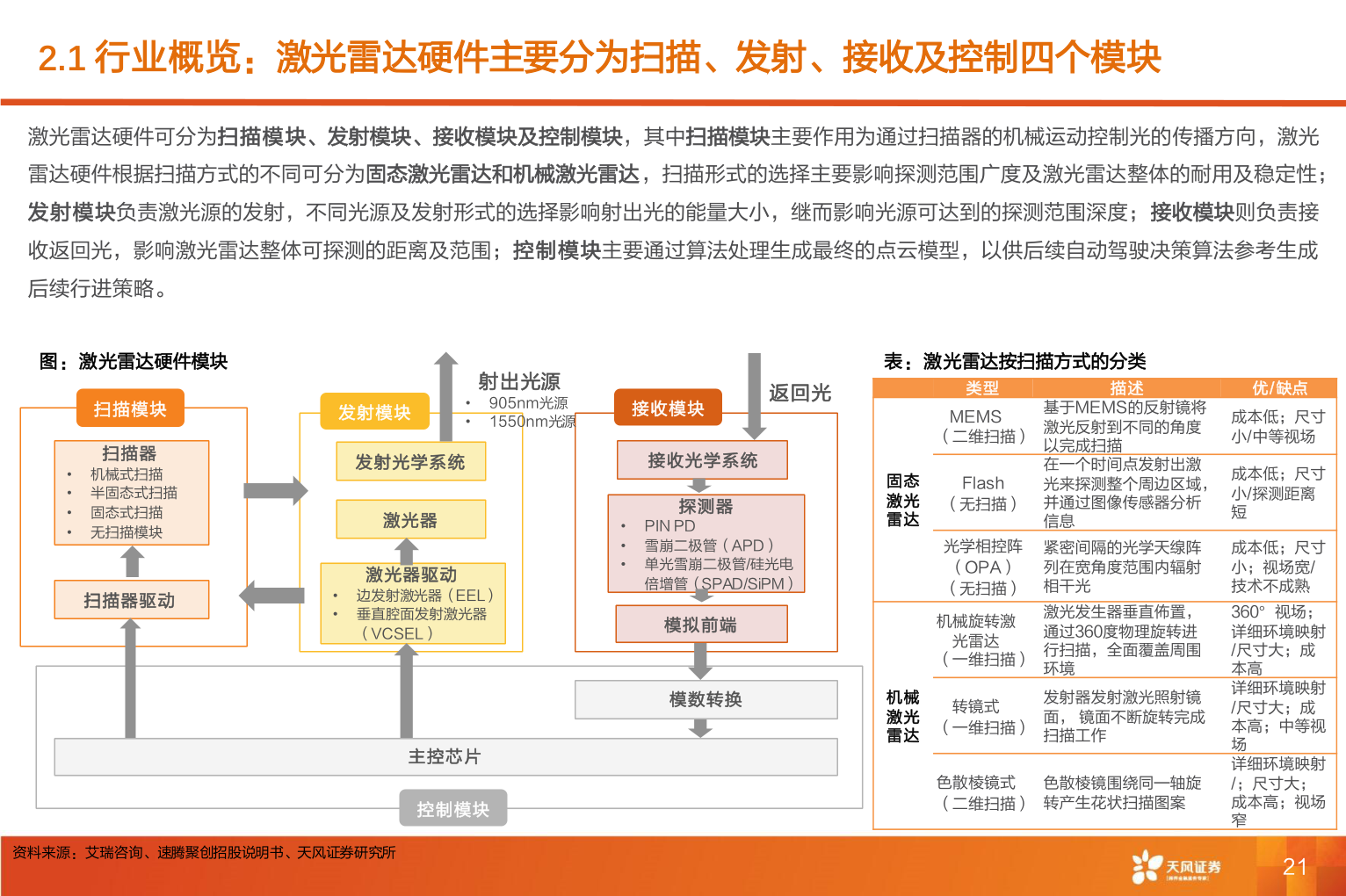
> 数据图表如何才能2.1 行业概览:激光雷达硬件主要分为扫描、发射、接收及控制四个模块2025-4-32.1 行业概览:激光雷达硬件主要分为扫描、发射、接收及控制四个模块激光雷达硬件可分为扫描模块、发射模块、接收模块及控制模块,其中扫描模块主要作用为通过扫描器的机械运动控制光的传播方向,激光雷达硬件根据扫描方式的不同可分为固态激光雷达和机械激光雷达,扫描形式的选择主要影响探测范围广度及激光雷达整体的耐用及稳定性;发射模块负责激光源的发射,不同光源及发射形式的选择影响射出光的能量大小,继而影响光源可达到的探测范围深度;接收模块则负责接收返回光,影响激光雷达整体可探测的距离及范围;控制模块主要通过算法处理生成最终的点云模型,以供后续自动驾驶决策算法参考生成后续行进策略。图:激光雷达硬件模块扫描模块扫描器• 机械式扫描• 半固态式扫描• 固态式扫描• 无扫描模块扫描器驱动发射模块射出光源905nm光源1550nm光源••接收模块返回光发射光学系统接收光学系统探测器• PIN PD• 雪崩二极管(APD)• 单光雪崩二极管/硅光电倍增管(SPAD/SiPM)模拟前端模数转换激光器激光器驱动• 边发射激光器(EEL)• 垂直腔面发射激光器(VCSEL)主控芯片控制模块资料来源:艾瑞咨询、速腾聚创招股说明书、天风证券研究所表:激光雷达按扫描方式的分类描述类型固态激光雷达MEMS(二维扫描)Flash(无扫描)光学相控阵(OPA)(无扫描)机械旋转激光雷达(一维扫描)基于MEMS的反射镜将激光反射到不同的角度以完成扫描在一个时间点发射出激光来探测整个周边区域,并通过图像传感器分析信息紧密间隔的光学天缐阵列在宽角度范围内辐射相干光激光发生器垂直佈置,通过360度物理旋转进行扫描,全面覆盖周围环境机械激光雷达转镜式(一维扫描)发射器发射激光照射镜面, 镜面不断旋转完成扫描工作色散棱镜式(二维扫描)色散棱镜围绕同—轴旋转产生花状扫描图案优/ 缺点成本低;尺寸小/中等视场成本低;尺寸小/探测距离短成本低;尺寸小;视场宽/技术不成熟360°视场;详细环境映射/尺寸大;成本高详细环境映射/尺寸大;成本高;中等视场详细环境映射/;尺寸大;成本高;视场窄21天风证券综合其他