> 数据图表如何了解灵巧手:特斯拉技术方案迭代,自由度大幅增加
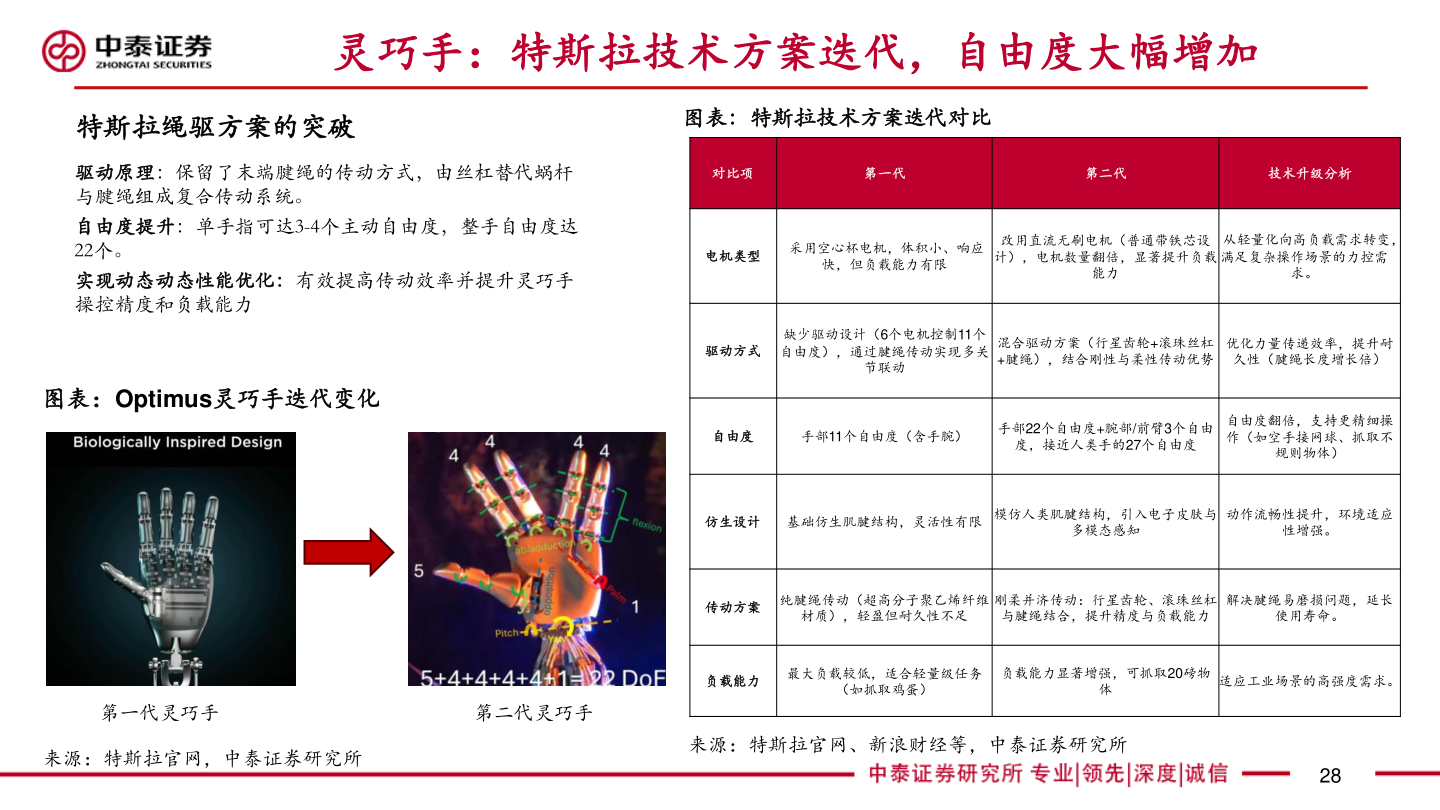
2025-4-3灵巧手:特斯拉技术方案迭代,自由度大幅增加特斯拉绳驱方案的突破图表:特斯拉技术方案迭代对比驱动原理:保留了末端腱绳的传动方式,由丝杠替代蜗杆与腱绳组成复合传动系统。自由度提升:单手指可达3-4个主动自由度,整手自由度达22个。实现动态动态性能优化:有效提高传动效率并提升灵巧手操控精度和负载能力图表:Optimus灵巧手迭代变化第一代灵巧手第二代灵巧手来源:特斯拉官网,中泰证券研究所对比项第一代第二代技术升级分析电机类型采用空心杯电机,体积小、响应快,但负载能力有限改用直流无刷电机(普通带铁芯设计),电机数量翻倍,显著提升负载从轻量化向高负载需求转变,满足复杂操作场景的力控需能力求。驱动方式缺少驱动设计(6个电机控制11个自由度),通过腱绳传动实现多关节联动混合驱动方案(行星齿轮+滚珠丝杠+腱绳),结合刚性与柔性传动优势优化力量传递效率,提升耐久性(腱绳长度增长倍)自由度手部11个自由度(含手腕)手部22个自由度+腕部/前臂3个自由度,接近人类手的27个自由度自由度翻倍,支持更精细操作(如空手接网球、抓取不规则物体)仿生设计 基础仿生肌腱结构,灵活性有限模仿人类肌腱结构,引入电子皮肤与动作流畅性提升,环境适应多模态感知性增强。传动方案纯腱绳传动(超高分子聚乙烯纤维材质),轻盈但耐久性不足刚柔并济传动:行星齿轮、滚珠丝杠与腱绳结合,提升精度与负载能力解决腱绳易磨损问题,延长使用寿命。负载能力最大负载较低,适合轻量级任务负载能力显著增强,可抓取20磅物(如抓取鸡蛋)体适应工业场景的高强度需求。来源:特斯拉官网、新浪财经等,中泰证券研究所28