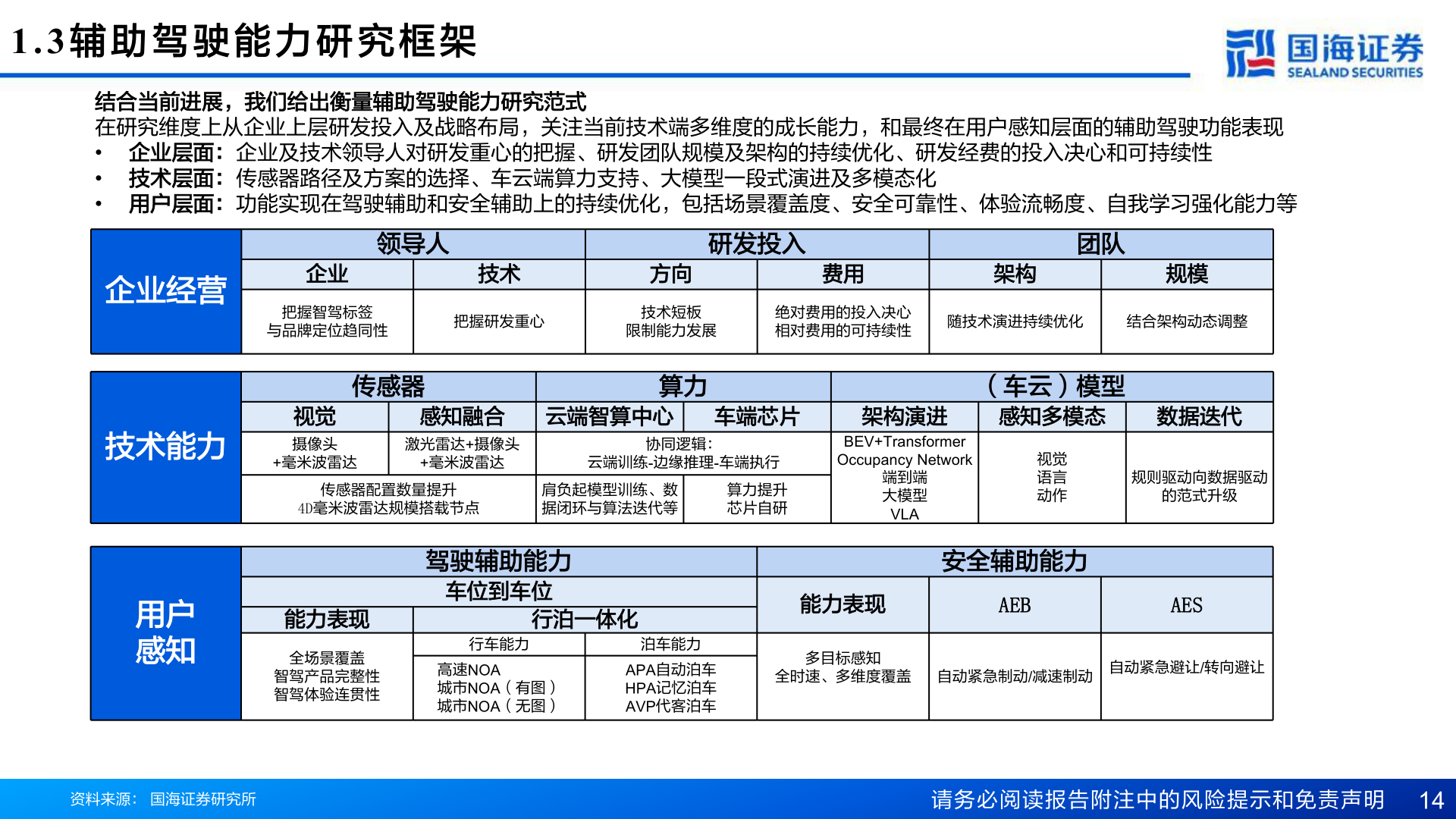
> 数据图表谁能回答1.3 辅 助 驾 驶 能 力 研 究 框 架2025-7-21.3 辅 助 驾 驶 能 力 研 究 框 架结合当前进展,我们给出衡量辅助驾驶能力研究范式在研究维度上从企业上层研发投入及战略布局,关注当前技术端多维度的成长能力,和最终在用户感知层面的辅助驾驶功能表现• 企业层面:企业及技术领导人对研发重心的把握、研发团队规模及架构的持续优化、研发经费的投入决心和可持续性• 技术层面:传感器路径及方案的选择、车云端算力支持、大模型一段式演进及多模态化• 用户层面:功能实现在驾驶辅助和安全辅助上的持续优化,包括场景覆盖度、安全可靠性、体验流畅度、自我学习强化能力等企业经营领导人研发投入团队企业技术方向费用架构规模把握智驾标签与品牌定位趋同性把握研发重心技术短板限制能力发展绝对费用的投入决心相对费用的可持续性随技术演进持续优化结合架构动态调整传感器算力(车云)模型感知融合 云端智算中心 车端芯片架构演进感知多模态数据迭代技术能力视觉摄像头+毫米波雷达激光雷达+摄像头+毫米波雷达传感器配置数量提升4D毫米波雷达规模搭载节点协同逻辑:云端训练-边缘推理-车端执行算力提升芯片自研肩负起模型训练、数据闭环与算法迭代等用户感知驾驶辅助能力车位到车位能力表现全场景覆盖智驾产品完整性智驾体验连贯性行泊一体化行车能力高速NOA -----------城市NOA(有图)城市NOA(无图)泊车能力APA自动泊车HPA记忆泊车AVP代客泊车BEV+TransformerOccupancy Network端到端大模型VLA视觉语言动作规则驱动向数据驱动的范式升级安全辅助能力能力表现AEBAES多目标感知全时速、多维度覆盖 自动紧急制动/减速制动自动紧急避让/转向避让资料来源: 国海证券研究所请务必阅读报告附注中的风险提示和免责声明 14国海证券综合其他