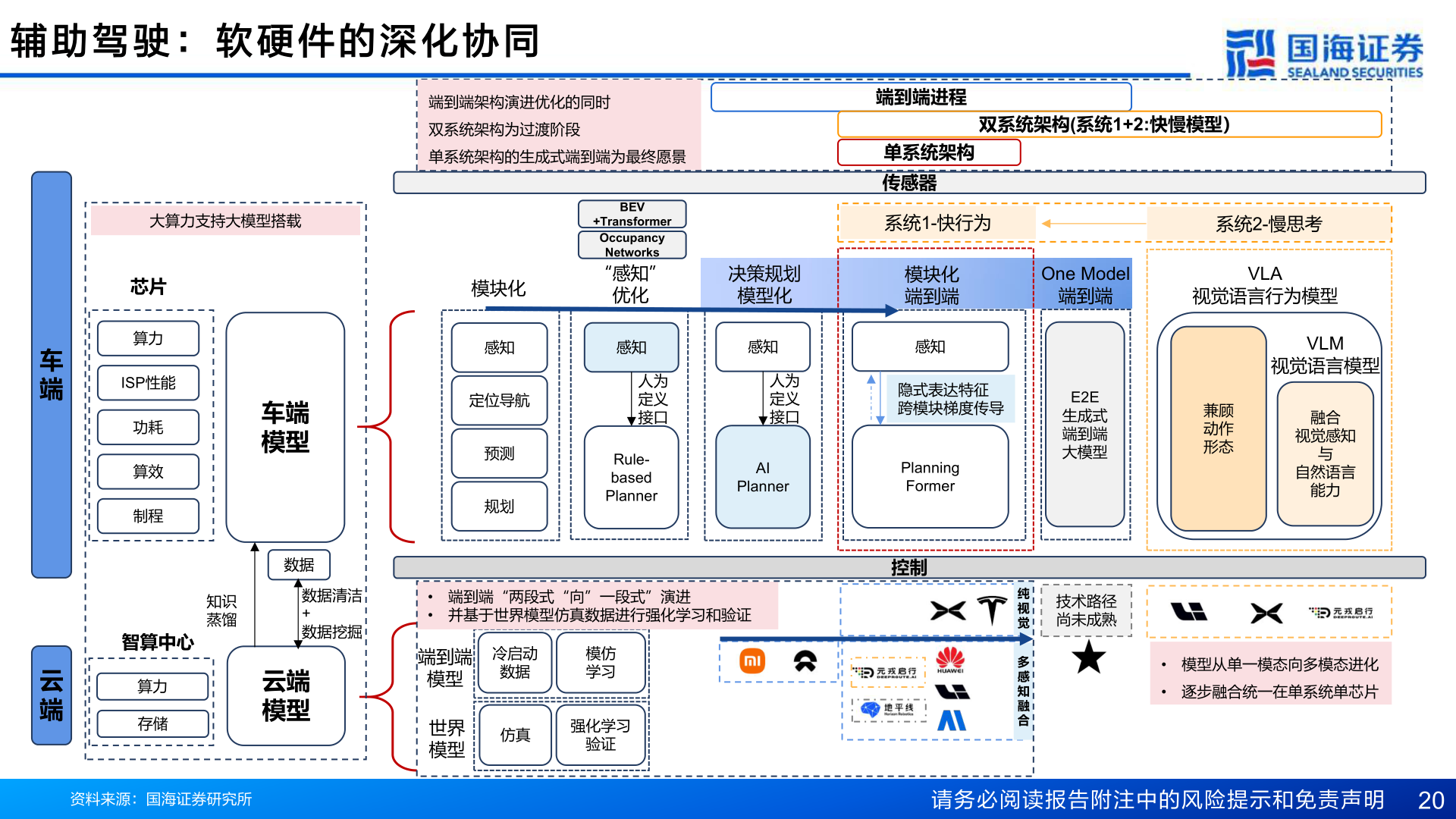
> 数据图表谁能回答辅 助 驾 驶 : 软 硬 件 的 深 化 协 同2025-7-2辅 助 驾 驶 : 软 硬 件 的 深 化 协 同端到端架构演进优化的同时双系统架构为过渡阶段单系统架构的生成式端到端为最终愿景大算力支持大模型搭载芯片算力ISP性能功耗算效制程车端模型BEV+TransformerOccupancy Networks“感知”优化决策规划模型化模块化感知感知感知定位导航预测规划人为定义接口Rule-based Planner人为定义接口AIPlanner知识蒸馏数据数据清洁+数据挖掘云端模型智算中心算力存储• 端到端“两段式“向”一段式”演进• 并基于世界模型仿真数据进行强化学习和验证端到端模型冷启动数据模仿学习世界模型仿真强化学习验证车端云端端到端进程双系统架构(系统1+2:快慢模型)单系统架构传感器系统1-快行为模块化端到端感知隐式表达特征跨模块梯度传导PlanningFormer控制系统2-慢思考One Model端到端VLA视觉语言行为模型VLM视觉语言模型E2E生成式端到端大模型兼顾动作形态融合视觉感知与自然语言能力技术路径尚未成熟纯视觉多感知融合• 模型从单一模态向多模态进化• 逐步融合统一在单系统单芯片资料来源:国海证券研究所请务必阅读报告附注中的风险提示和免责声明 20国海证券综合其他