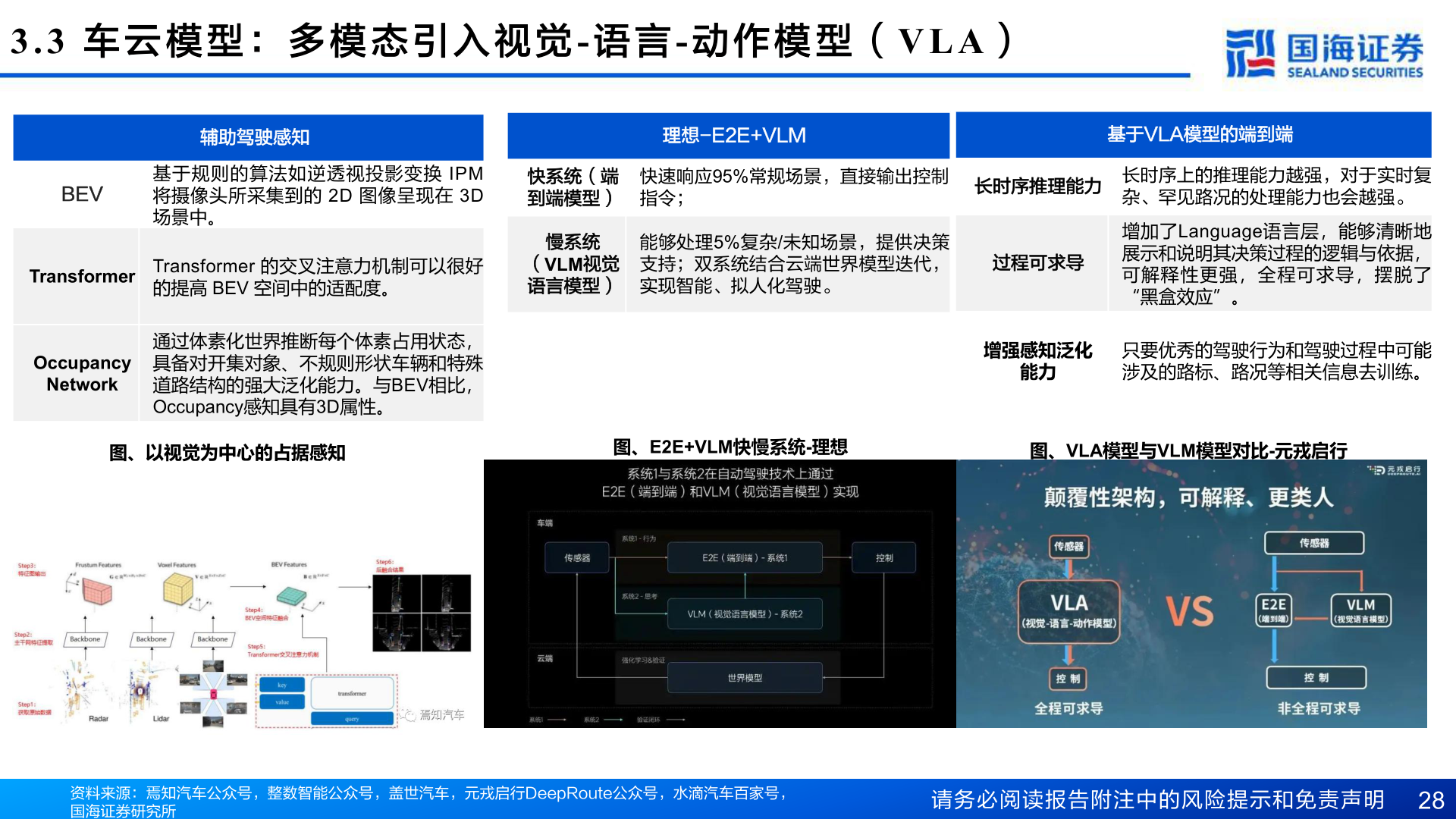
> 数据图表谁知道3.3 车 云 模 型 : 多 模 态 引 入 视 觉- 语 言- 动 作 模 型 (VLA )2025-7-23.3 车 云 模 型 : 多 模 态 引 入 视 觉- 语 言- 动 作 模 型 (VLA )辅助驾驶感知理想-E2E+VLM基于VLA模型的端到端BEV基于规则的算法如逆透视投影变换 IPM 将摄像头所采集到的 2D 图像呈现在 3D 场景中。Transformer Transformer 的交叉注意力机制可以很好的提高 BEV 空间中的适配度。OccupancyNetwork通过体素化世界推断每个体素占用状态,具备对开集对象、不规则形状车辆和特殊道路结构的强大泛化能力。与BEV相比,Occupancy感知具有3D属性。快系统(端到端模型)快速响应95%常规场景,直接输出控制指令;长时序推理能力慢系统(VLM视觉语言模型)能够处理5%复杂/未知场景,提供决策支持;双系统结合云端世界模型迭代,实现智能、拟人化驾驶。过程可求导长时序上的推理能力越强,对于实时复杂、罕见路况的处理能力也会越强。增加了Language语言层,能够清晰地展示和说明其决策过程的逻辑与依据,可解释性更强,全程可求导,摆脱了 “黑盒效应”。增强感知泛化能力只要优秀的驾驶行为和驾驶过程中可能涉及的路标、路况等相关信息去训练。图、以视觉为中心的占据感知图、E2E+VLM快慢系统-理想图、VLA模型与VLM模型对比-元戎启行资料来源:焉知汽车公众号,整数智能公众号,盖世汽车,元戎启行DeepRoute公众号,水滴汽车百家号,国海证券研究所请务必阅读报告附注中的风险提示和免责声明 28国海证券综合其他