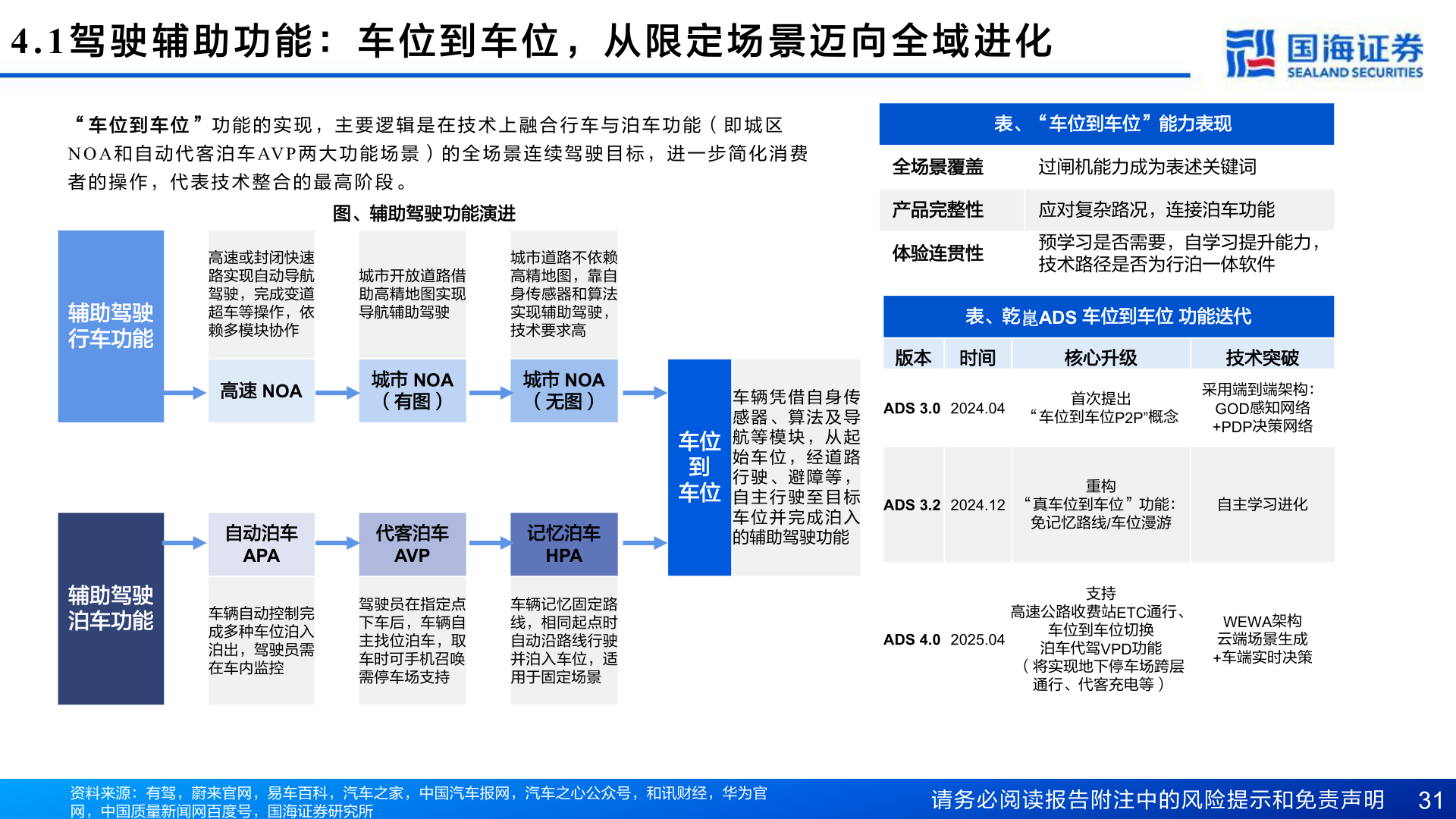
> 数据图表咨询下各位4.1 驾 驶 辅 助 功 能 : 车 位 到 车 位 , 从 限 定 场 景 迈 向 全 域 进 化2025-7-24.1 驾 驶 辅 助 功 能 : 车 位 到 车 位 , 从 限 定 场 景 迈 向 全 域 进 化“ 车 位 到 车 位 ” 功 能 的 实 现 , 主 要 逻 辑 是 在 技 术 上 融 合 行 车 与 泊 车 功 能 ( 即 城 区NOA 和 自 动 代 客 泊 车AVP 两 大 功 能 场 景 ) 的 全 场 景 连 续 驾 驶 目 标 , 进 一 步 简 化 消 费者 的 操 作 , 代 表 技 术 整 合 的 最 高 阶 段 。表、“车位到车位”能力表现全场景覆盖过闸机能力成为表述关键词辅助驾驶行车功能图、辅助驾驶功能演进高速或封闭快速路实现自动导航驾驶,完成变道、超车等操作,依赖多模块协作城市开放道路借助高精地图实现导航辅助驾驶城市道路不依赖高精地图,靠自身传感器和算法实现辅助驾驶,技术要求高高速 NOA城市 NOA(有图)城市 NOA(无图)辅助驾驶泊车功能自动泊车APA代客泊车AVP记忆泊车HPA车辆自动控制完成多种车位泊入泊出,驾驶员需在车内监控驾驶员在指定点下车后,车辆自主找位泊车,取车时可手机召唤,需停车场支持车辆记忆固定路线,相同起点时自动沿路线行驶并泊入车位,适用于固定场景产品完整性应对复杂路况,连接泊车功能体验连贯性预学习是否需要,自学习提升能力,技术路径是否为行泊一体软件表、乾崑ADS 车位到车位 功能迭代版本 时间核心升级技术突破ADS 3.0 2024.04首次提出“车位到车位P2P”概念采用端到端架构:GOD感知网络+PDP决策网络ADS 3.2 2024.12重构“真车位到车位”功能:免记忆路线/车位漫游自主学习进化车位到车位车辆凭借自身传感器、算法及导航等模块,从起始车位,经道路行驶、避障等,自主行驶至目标车位并完成泊入的辅助驾驶功能支持高速公路收费站ETC通行、车位到车位切换泊车代驾VPD功能ADS 4.0 2025.04(将实现地下停车场跨层通行、代客充电等)WEWA架构云端场景生成+车端实时决策资料来源:有驾,蔚来官网,易车百科,汽车之家,中国汽车报网,汽车之心公众号,和讯财经,华为官网,中国质量新闻网百度号,国海证券研究所请务必阅读报告附注中的风险提示和免责声明 31国海证券综合其他