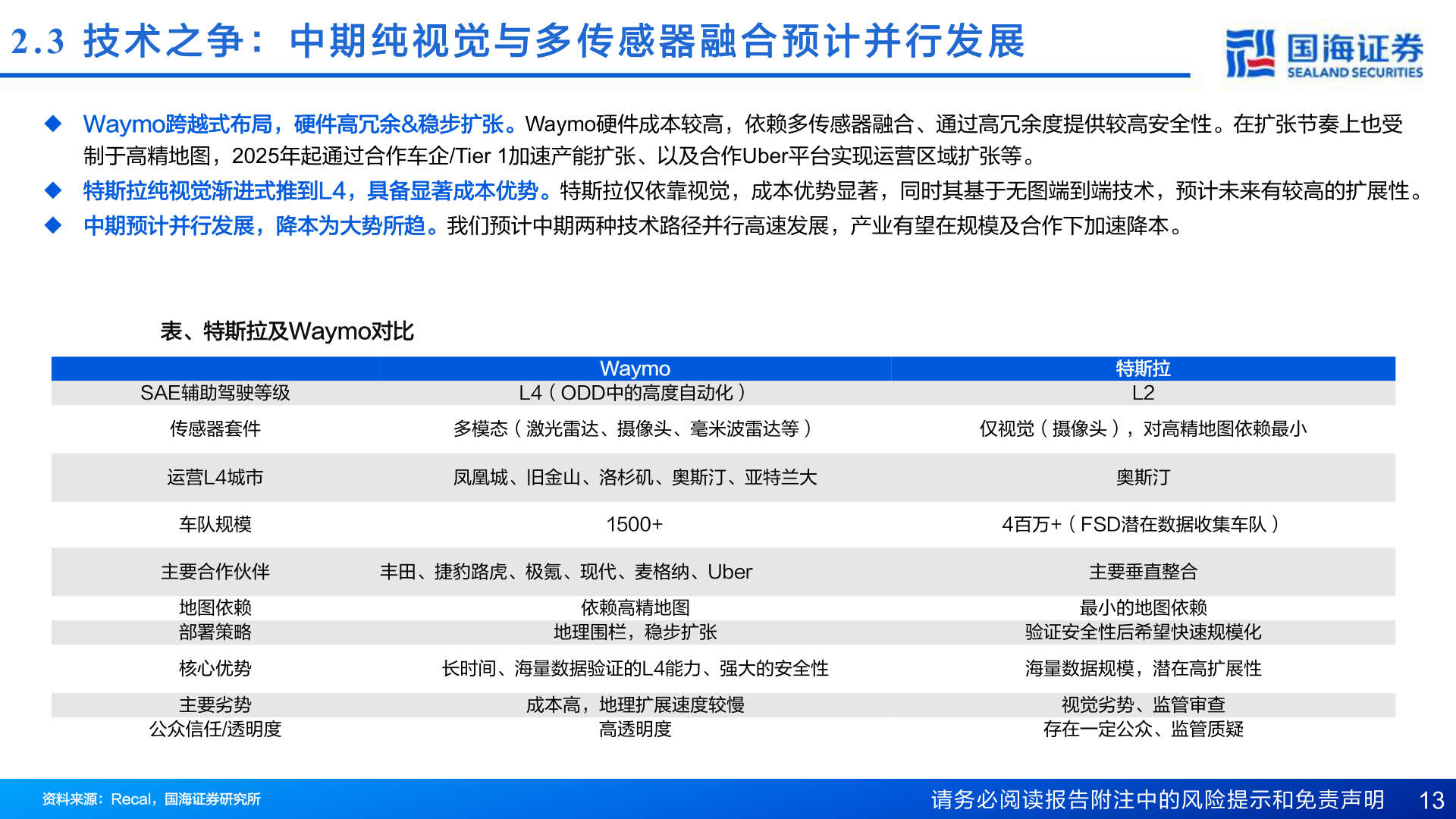
> 数据图表如何才能2.3 技 术 之 争 : 中 期 纯 视 觉 与 多 传 感 器 融 合 预 计 并 行 发 展2025-8-52.3 技 术 之 争 : 中 期 纯 视 觉 与 多 传 感 器 融 合 预 计 并 行 发 展u Waymo跨越式布局,硬件高冗余&稳步扩张。Waymo硬件成本较高,依赖多传感器融合、通过高冗余度提供较高安全性。在扩张节奏上也受制于高精地图,2025年起通过合作车企/Tier 1加速产能扩张、以及合作Uber平台实现运营区域扩张等。u 特斯拉纯视觉渐进式推到L4,具备显著成本优势。特斯拉仅依靠视觉,成本优势显著,同时其基于无图端到端技术,预计未来有较高的扩展性。u 中期预计并行发展,降本为大势所趋。我们预计中期两种技术路径并行高速发展,产业有望在规模及合作下加速降本。表、特斯拉及Waymo对比SAE辅助驾驶等级传感器套件运营L4城市车队规模WaymoL4(ODD中的高度自动化)特斯拉L2多模态(激光雷达、摄像头、毫米波雷达等)仅视觉(摄像头),对高精地图依赖最小凤凰城、旧金山、洛杉矶、奥斯汀、亚特兰大奥斯汀1500+4百万+(FSD潜在数据收集车队)主要合作伙伴丰田、捷豹路虎、极氪、现代、麦格纳、Uber地图依赖部署策略核心优势主要劣势公众信任/透明度依赖高精地图地理围栏,稳步扩张长时间、海量数据验证的L4能力、强大的安全性成本高,地理扩展速度较慢高透明度主要垂直整合最小的地图依赖验证安全性后希望快速规模化海量数据规模,潜在高扩展性视觉劣势、监管审查存在一定公众、监管质疑资料来源:Recal,国海证券研究所请务必阅读报告附注中的风险提示和免责声明 13国海证券综合其他