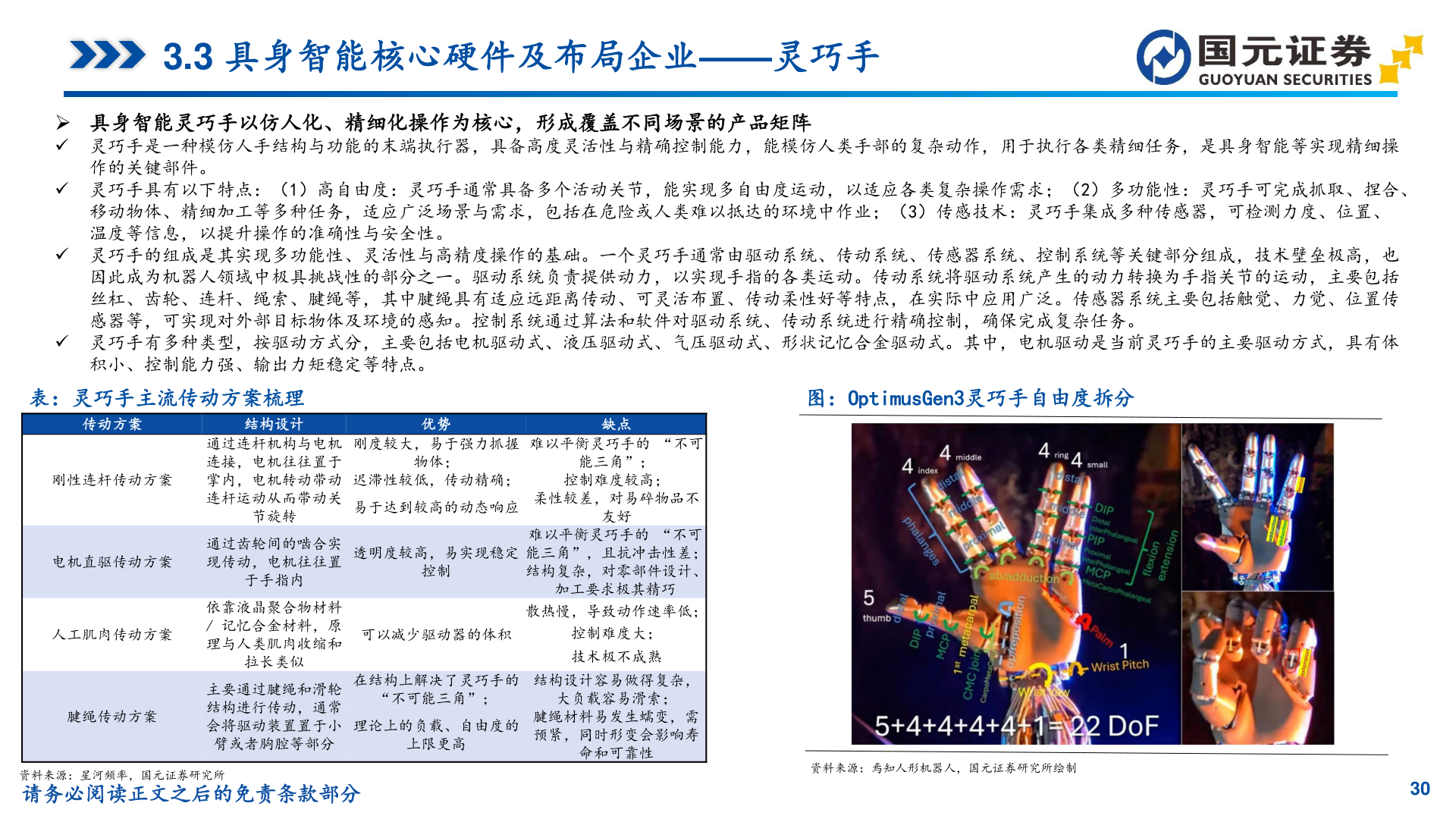
> 数据图表如何才能3.3 具身智能核心硬件及布局企业——灵巧手2025-8-53.3 具身智能核心硬件及布局企业——灵巧手 具身智能灵巧手以仿人化、精细化操作为核心,形成覆盖不同场景的产品矩阵 灵巧手是一种模仿人手结构与功能的末端执行器,具备高度灵活性与精确控制能力,能模仿人类手部的复杂动作,用于执行各类精细任务,是具身智能等实现精细操作的关键部件。 灵巧手具有以下特点:(1)高自由度:灵巧手通常具备多个活动关节,能实现多自由度运动,以适应各类复杂操作需求;(2)多功能性:灵巧手可完成抓取、捏合、移动物体、精细加工等多种任务,适应广泛场景与需求,包括在危险或人类难以抵达的环境中作业;(3)传感技术:灵巧手集成多种传感器,可检测力度、位置、温度等信息,以提升操作的准确性与安全性。 灵巧手的组成是其实现多功能性、灵活性与高精度操作的基础。一个灵巧手通常由驱动系统、传动系统、传感器系统、控制系统等关键部分组成,技术壁垒极高,也因此成为机器人领域中极具挑战性的部分之一。驱动系统负责提供动力,以实现手指的各类运动。传动系统将驱动系统产生的动力转换为手指关节的运动,主要包括丝杠、齿轮、连杆、绳索、腱绳等,其中腱绳具有适应远距离传动、可灵活布置、传动柔性好等特点,在实际中应用广泛。传感器系统主要包括触觉、力觉、位置传感器等,可实现对外部目标物体及环境的感知。控制系统通过算法和软件对驱动系统、传动系统进行精确控制,确保完成复杂任务。 灵巧手有多种类型,按驱动方式分,主要包括电机驱动式、液压驱动式、气压驱动式、形状记忆合金驱动式。其中,电机驱动是当前灵巧手的主要驱动方式,具有体积小、控制能力强、输出力矩稳定等特点。表:灵巧手主流传动方案梳理结构设计传动方案刚性连杆传动方案电机直驱传动方案人工肌肉传动方案腱绳传动方案通过连杆机构与电机连接,电机往往置于掌内,电机转动带动连杆运动从而带动关节旋转通过齿轮间的啮合实现传动,电机往往置于手指内依靠液晶聚合物材料/ 记忆合金材料,原理与人类肌肉收缩和拉长类似主要通过腱绳和滑轮结构进行传动,通常会将驱动装置置于小臂或者胸腔等部分优势缺点刚度较大,易于强力抓握难以平衡灵巧手的 “不可物体;能三角”;迟滞性较低,传动精确;控制难度较高;易于达到较高的动态响应透明度较高,易实现稳定控制可以减少驱动器的体积柔性较差,对易碎物品不友好难以平衡灵巧手的 “不可能三角”,且抗冲击性差;结构复杂,对零部件设计、加工要求极其精巧散热慢,导致动作速率低;控制难度大;技术极不成熟在结构上解决了灵巧手的结构设计容易做得复杂,“不可能三角”;大负载容易滑索;理论上的负载、自由度的上限更高腱绳材料易发生蠕变,需预紧,同时形变会影响寿命和可靠性资料来源:星河频率,国元证券研究所请务必阅读正文之后的免责条款部分图:OptimusGen3灵巧手自由度拆分资料来源:焉知人形机器人,国元证券研究所绘制30国元证券综合其他