> 数据图表怎样理解2.2 端到端+智驾平权,智驾SOC全面发力
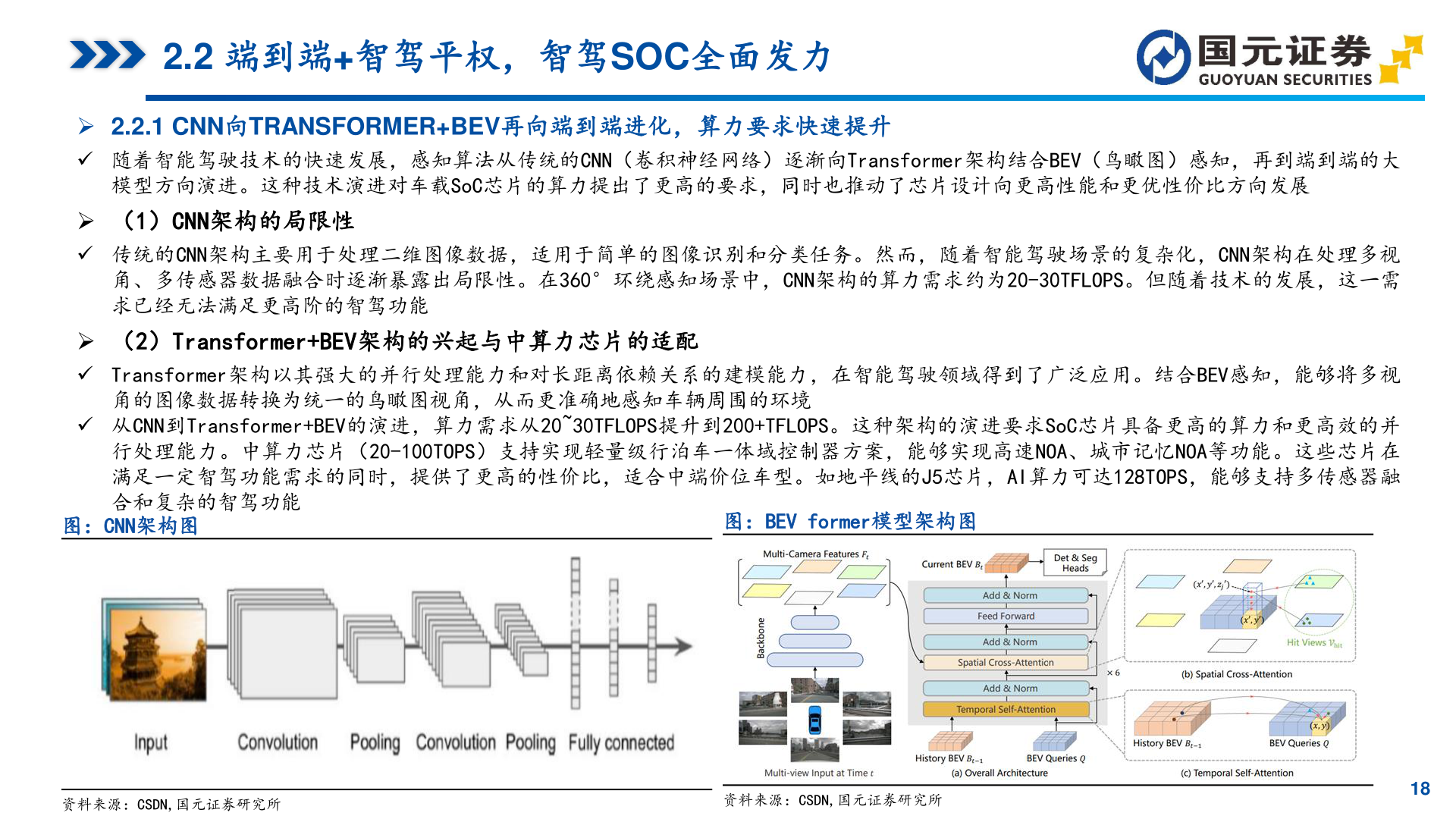
2025-8-22.2 端到端+智驾平权,智驾SOC全面发力 2.2.1 CNN向TRANSFORMER+BEV再向端到端进化,算力要求快速提升 随着智能驾驶技术的快速发展,感知算法从传统的CNN(卷积神经网络)逐渐向Transformer架构结合BEV(鸟瞰图)感知,再到端到端的大模型方向演进。这种技术演进对车载SoC芯片的算力提出了更高的要求,同时也推动了芯片设计向更高性能和更优性价比方向发展 (1)CNN架构的局限性 传统的CNN架构主要用于处理二维图像数据,适用于简单的图像识别和分类任务。然而,随着智能驾驶场景的复杂化,CNN架构在处理多视角、多传感器数据融合时逐渐暴露出局限性。在360°环绕感知场景中,CNN架构的算力需求约为20-30TFLOPS。但随着技术的发展,这一需求已经无法满足更高阶的智驾功能 (2)Transformer+BEV架构的兴起与中算力芯片的适配 Transformer架构以其强大的并行处理能力和对长距离依赖关系的建模能力,在智能驾驶领域得到了广泛应用。结合BEV感知,能够将多视角的图像数据转换为统一的鸟瞰图视角,从而更准确地感知车辆周围的环境 从CNN到Transformer+BEV的演进,算力需求从20~30TFLOPS提升到200+TFLOPS。这种架构的演进要求SoC芯片具备更高的算力和更高效的并行处理能力。中算力芯片(20-100TOPS)支持实现轻量级行泊车一体域控制器方案,能够实现高速NOA、城市记忆NOA等功能。这些芯片在满足一定智驾功能需求的同时,提供了更高的性价比,适合中端价位车型。如地平线的J5芯片,AI算力可达128TOPS,能够支持多传感器融合和复杂的智驾功能图:CNN架构图图:BEV former模型架构图请务必阅读正文之后的免责条款部分资料来源:CSDN,国元证券研究所资料来源:CSDN,国元证券研究所18